Electric bicycle control method based on integral sliding mode and disturbance observer
A technology of disturbance observer and electric bicycle, which is applied in the field of AC servo system, can solve problems such as large k and serious system chattering, and achieve the effect of enhancing stability, good dynamic performance and anti-disturbance ability, and weakening chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further explained below in conjunction with the figures.
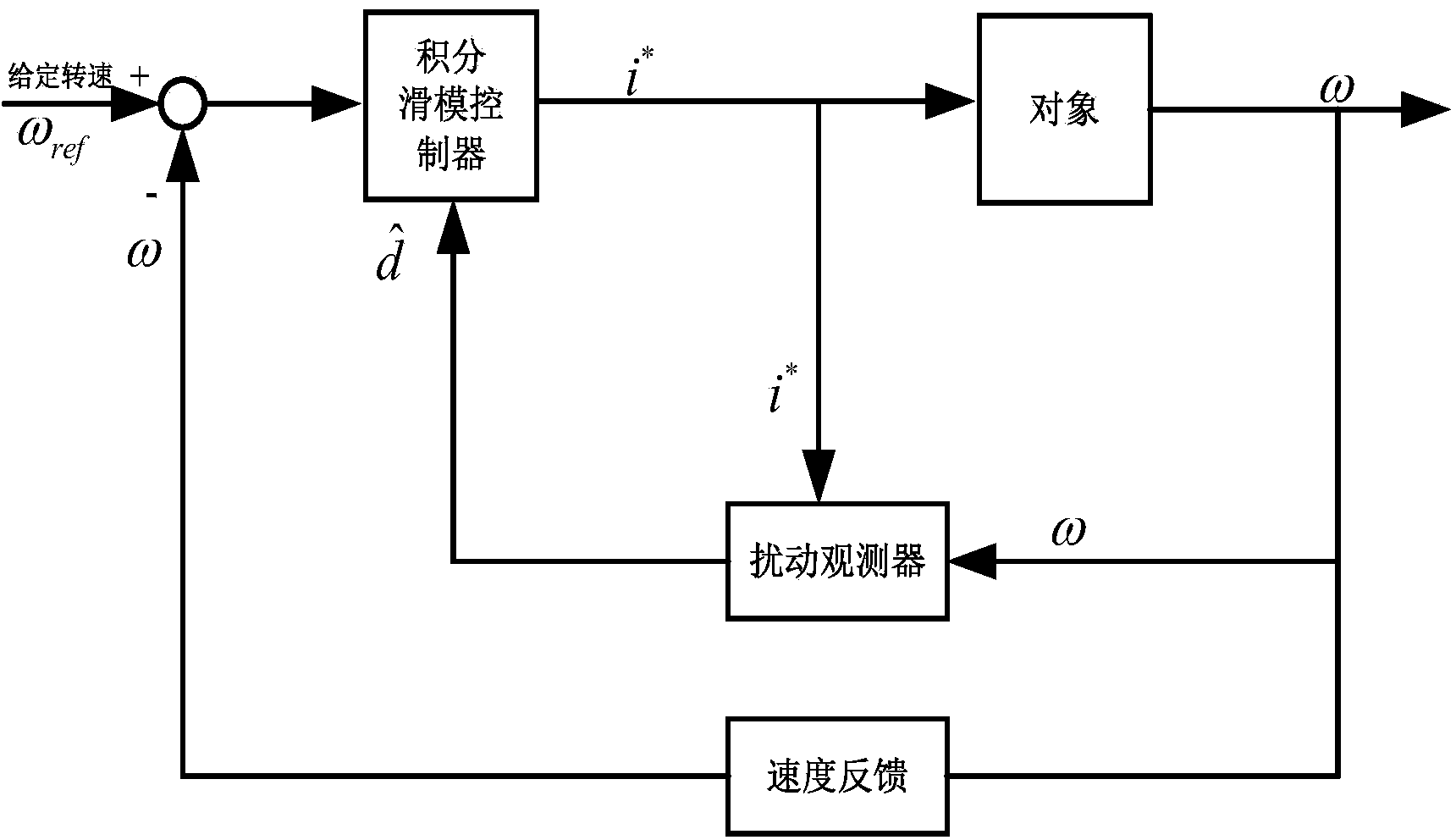
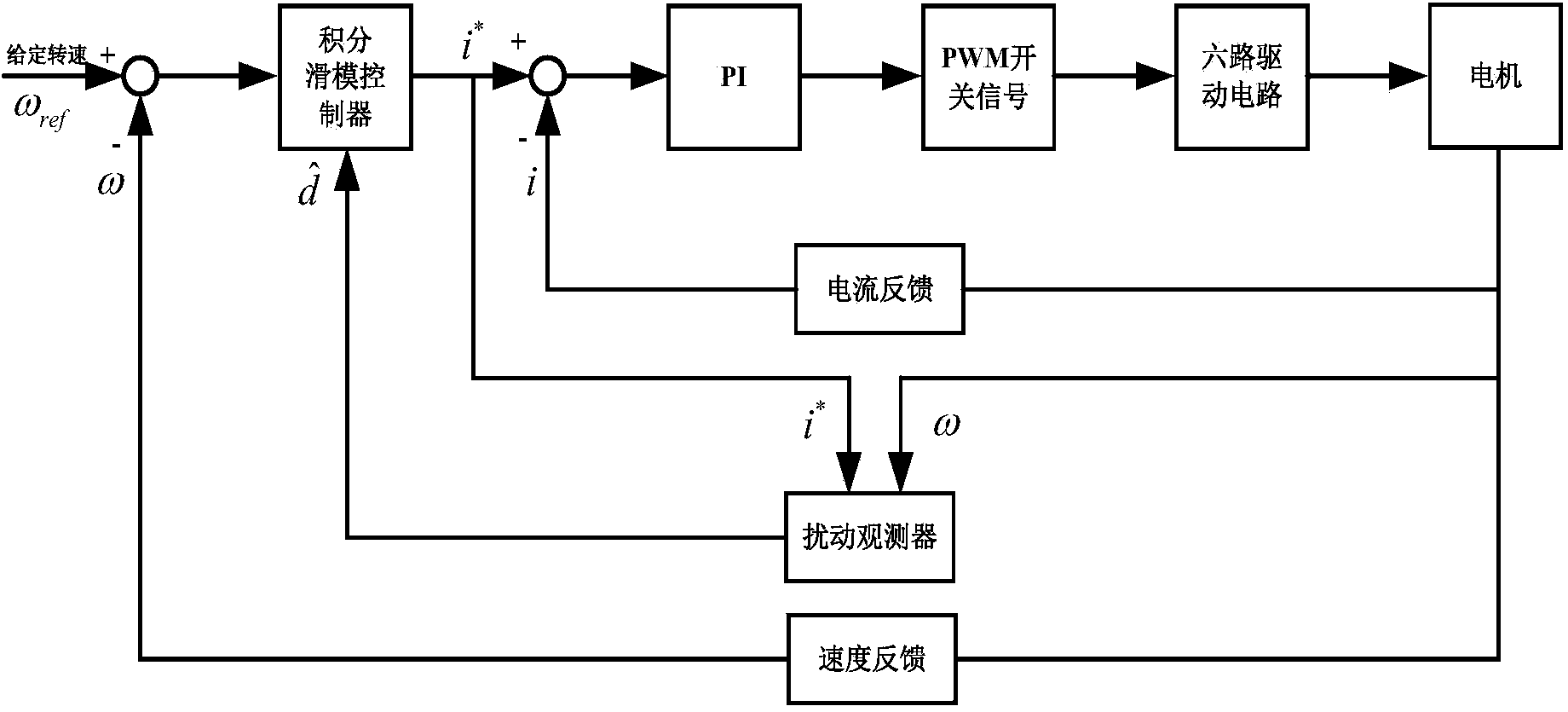
[0059] Such as figure 1 and figure 2 As shown, the present invention provides an electric vehicle control method based on an integral sliding mode and a disturbance observer, including a motor, and is characterized in that, including an integral sliding mode controller and a disturbance observer, the specific steps are as follows:
[0060] Step 1): sampling the bus current i of the electric bicycle with a sampling resistor;
[0061] Step 2): Obtain the rotor position of the electric bicycle motor through the Hall sensor and calculate the actual speed ω of the motor;
[0062] Step 3): Using the speed reference ω ref The difference e(t) with the actual running speed ω of the motor in step 2) constructs the integral sliding surface S;
[0063] Step 4): According to the integral sliding mode surface S in step 3), set the integral sliding mode speed controller to adjust the speed, s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com