

Rigid-flexible coupling buffer bionic foot
A rigid-flexible coupling and foot-growing technology, which is applied in springs/shock absorbers, vibration suppression adjustment, and motor vehicles, can solve the problems of poor cushioning performance of the quadruped robot leg-foot system, and achieve the effect of ensuring normal operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
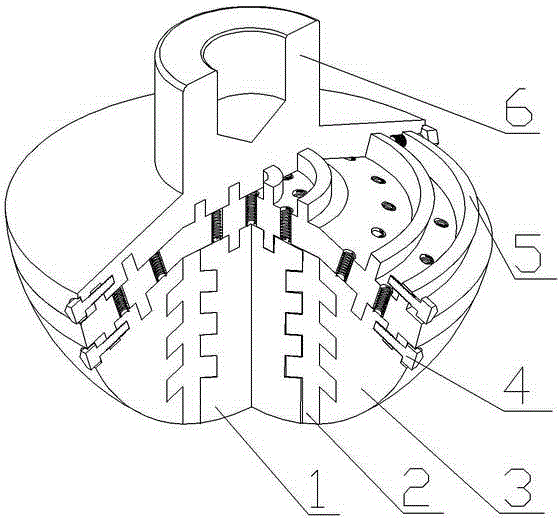
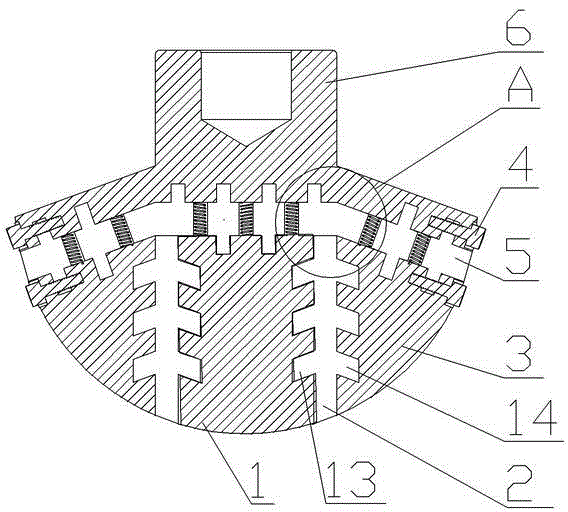
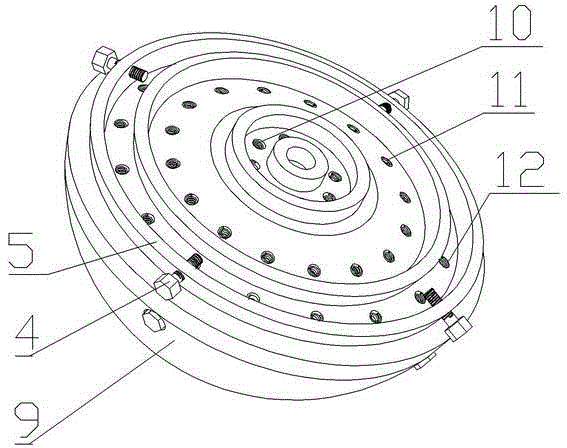
[0020] see figure 1 , figure 2 , image 3 and Figure 4 As shown, this embodiment includes a coupling sole 9, an upper flexible layer 5, a top cover plate 6, a torsion spring 7 and a compression spring 8, the lower end of the coupling sole 9 is in contact with the ground, and the upper end of the coupling sole 9 is in the circumferential direction. Be fixed on the lower end of upper flexible layer 5 by bolt 4, the upper end circumferential direction of upper flexible layer 5 is fixed on the lower end of foot top cover plate 6 by bolt 4, the upper end of foot top cover plate 6 is connected with the lower limb of robot; Coupling sole 9 It includes a radial plantar plate 1, a bottom flexible layer 2 and a lateral plantar plate 3. The external chute of the radial plantar plate 1 engages with the internal slope 13 of the bottom flexible layer 2, and the external slope 14 of the bottom flexible layer 2 engages with the The internal chute of the lateral sole plate 3 is engaged, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More