

Small underwater hydraulic mechanical arm two-stage drive joint
A technology of manipulators and small water, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of small driving torque, less operating manipulators, and rare miniaturized hydraulic manipulators, and achieve a small ratio of volume to weight to driving force and a compact structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
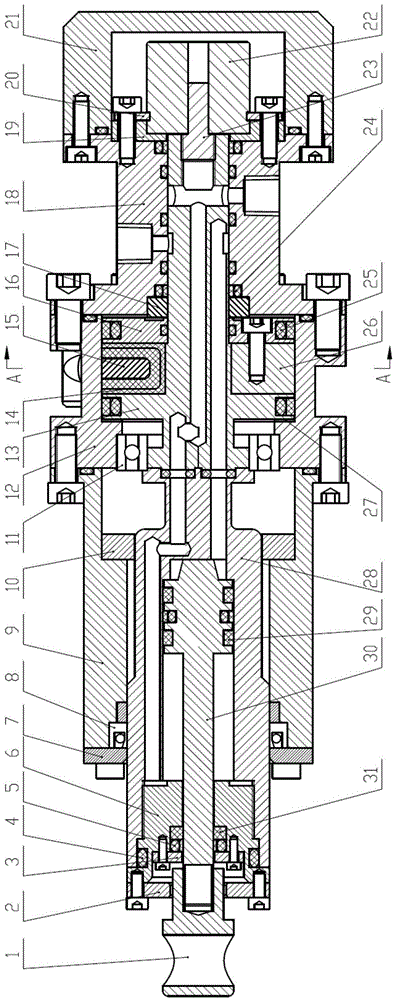
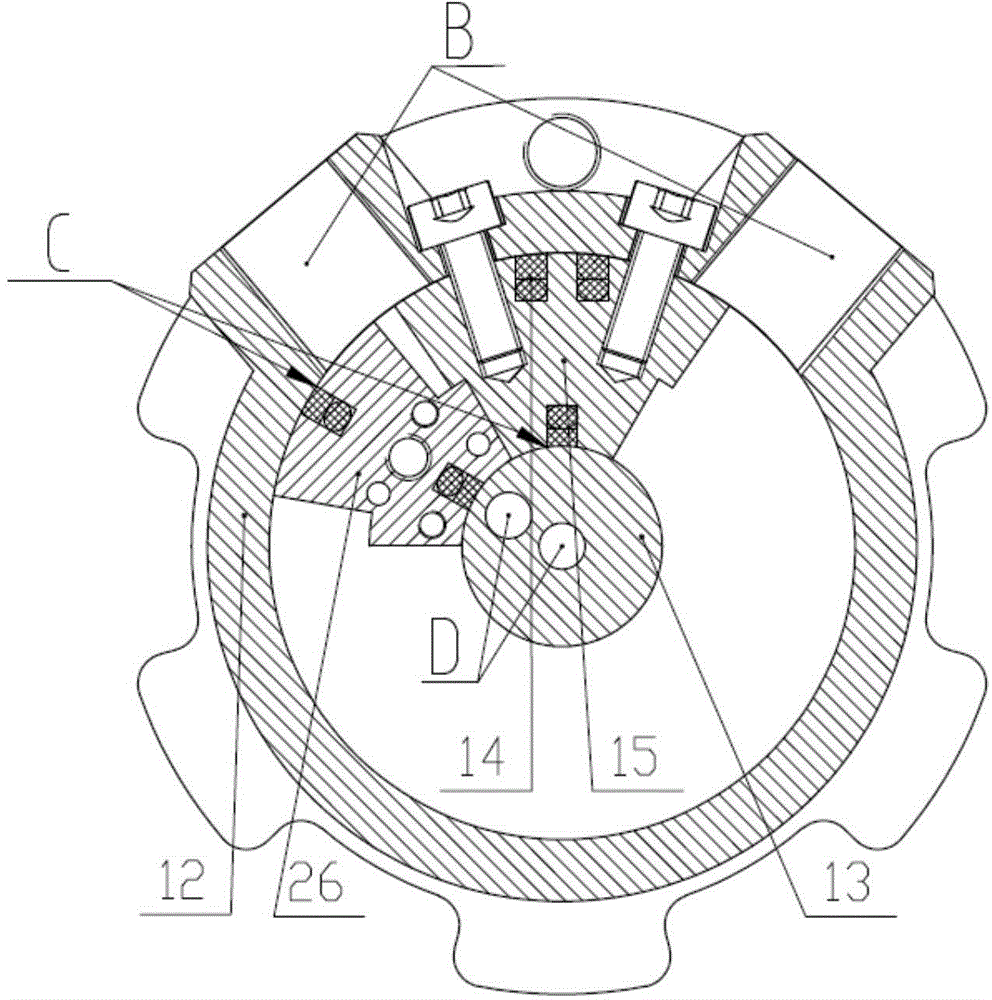
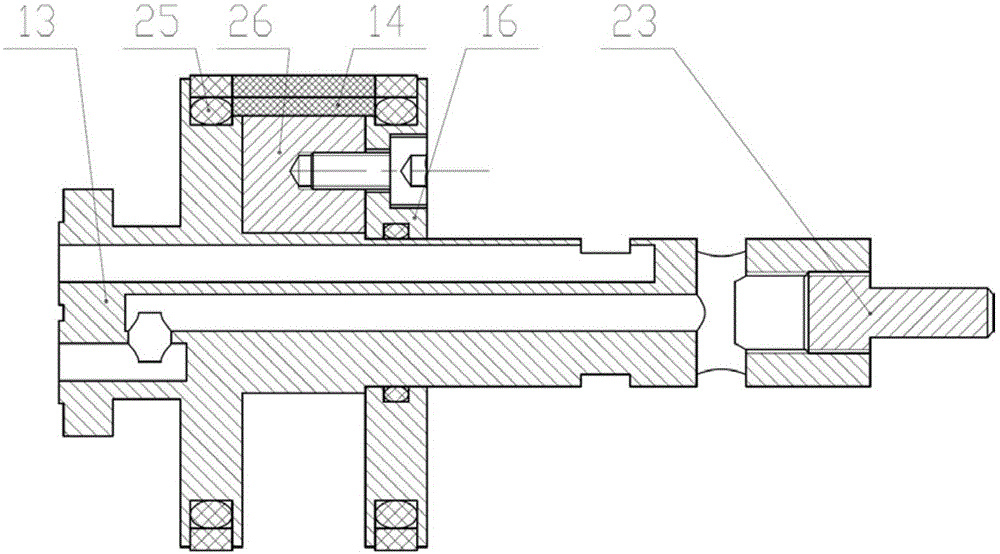
[0021] The present invention is described in more detail below in conjunction with accompanying drawing example:
[0022] combine Figure 1-7 , the purpose of the present invention is achieved in this way: the two-stage drive joint includes a first-stage linear motion paw-driven hydraulic cylinder assembly, a second-stage joint rotation assembly, a position detection assembly, and the rear end of the first-stage hydraulic cylinder assembly is connected to the second stage. The front end of the first-level wrist joint is connected by screws, the oil circuit inside the component is sealed by an O-ring, and the position detection component is in interference fit with the rear-end support shaft of the second-level wrist joint; through the oil inlet / outlet in the middle of the second-level joint mechanism The hydraulic oil at the port drives the wrist joint to rotate and drives the first-stage hand hydraulic cylinder assembly to rotate together, and the hydraulic oil at the inlet / o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More