

Workpiece procedure transferring mechanical arm
A technology of manipulators and workpieces, which is applied in the field of robots, can solve problems such as labor-intensive operators, loud noises, and damage to brake discs, and achieve the effects of simple structure, high operation accuracy, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
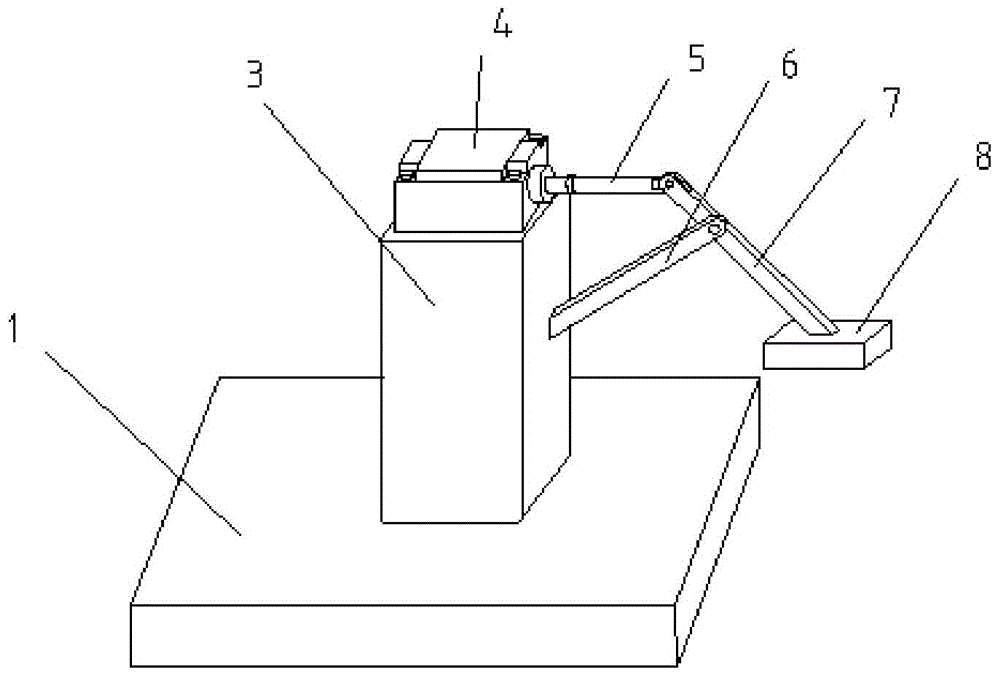
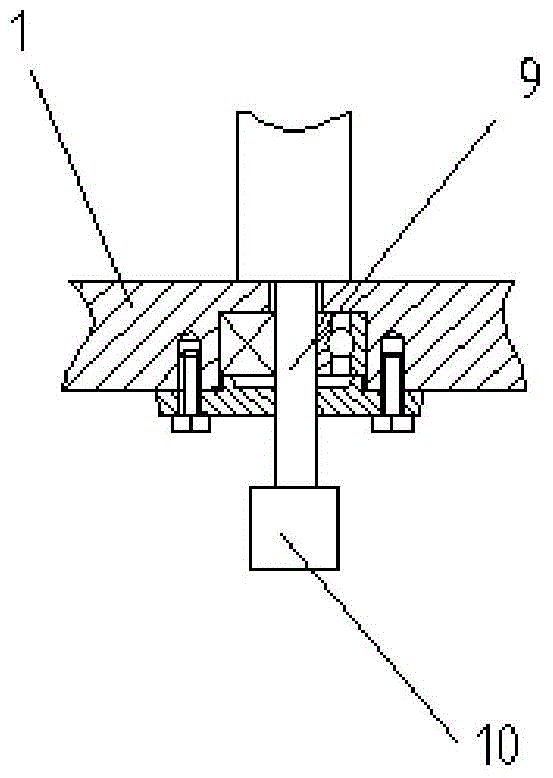
[0017] Such as figure 1 and figure 2 As shown, a workpiece transfer sequence manipulator includes a flat plate 1 and a rotating column 3, the rotating column 3 is vertically arranged, and the lower part of the rotating column 3 is integrally formed with a rotating shaft 9, and the rotating column 3 passes through the rotating shaft 9 and the flat plate 1 Rotationally connected, a bearing is provided between the rotating shaft 9 and the flat plate 1, and a cylinder 4 is provided on the top of the rotating column 3. The piston rod of the cylinder 4 is fixedly connected to one end of the first connecting rod 5, and the other end of the first connecting rod 5 It is hinged with one end of the second connecting rod 7, and the other end of the second connecting rod 7 is fixedly connected with a horizontally arranged suction cup 8, and an electromag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More