

Robot tool central point calibration method using two-dimensional measurement functional tablet
A tool center point, two-dimensional measurement technology, applied in the direction of measuring devices, instruments, etc., can solve the problems of complicated calibration operation and low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the embodiments and the accompanying drawings.
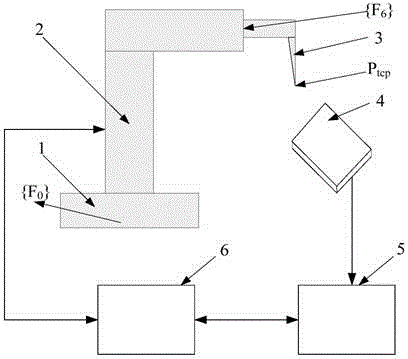
[0028] Such as figure 1 As shown, it is a schematic structural diagram of the robot and the two-dimensional measurement function plate used in the embodiment of the present invention, including a fixed robot base 1, a 6-DOF robot 2, a welding torch 3, and a resistive touch screen 4 used as a calibration tool.
[0029] {F 0} is the robot world coordinate system established in the space where the robot base is located, {F 6} is the end coordinate system of the robot tool in the space where the end flange of the robot is located. The computer 5 is used to collect the signals of the resistive screen to determine whether the resistive screen is touched, and the coordinates of the touch point on the screen. The computer is connected to the robot controller 6 through the network. When the touch signal appears on the resistive screen, it can send a stop m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More