

Searching and rescue robot system moving control method based on multi-intelligent-agent theory
A robot system and multi-agent technology, applied in the field of intelligent control, can solve the problems of incomplete search and rescue technology and lack of group behavior control of search and rescue robots, and achieve the effects of saving search and rescue time, good coordination, and simplified control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
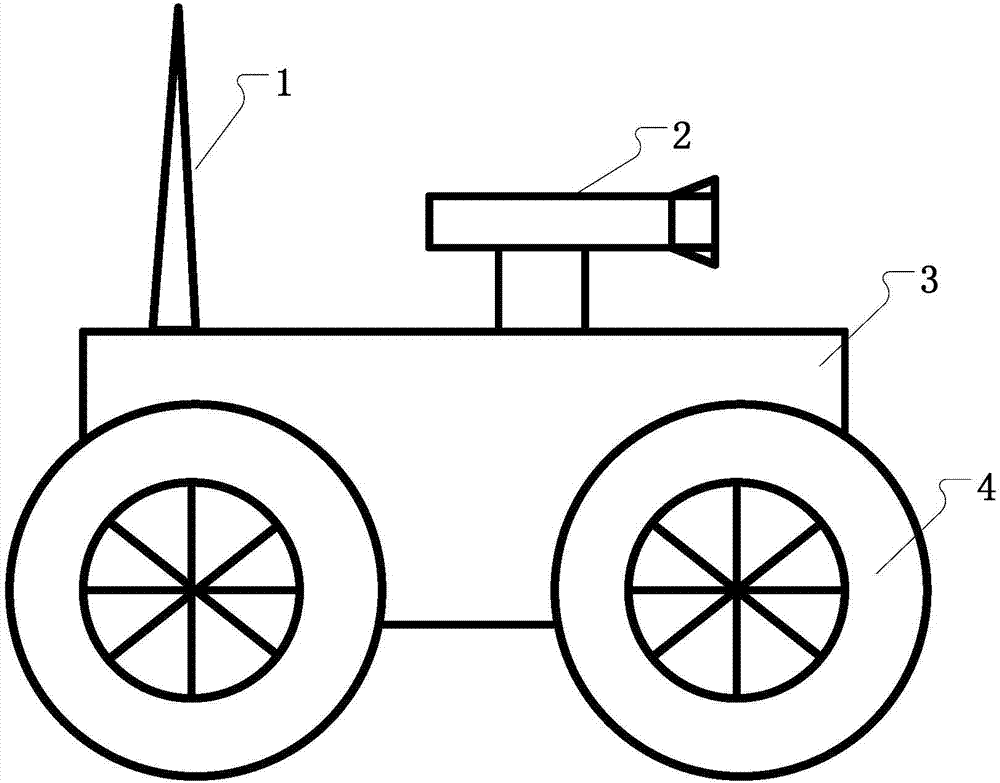
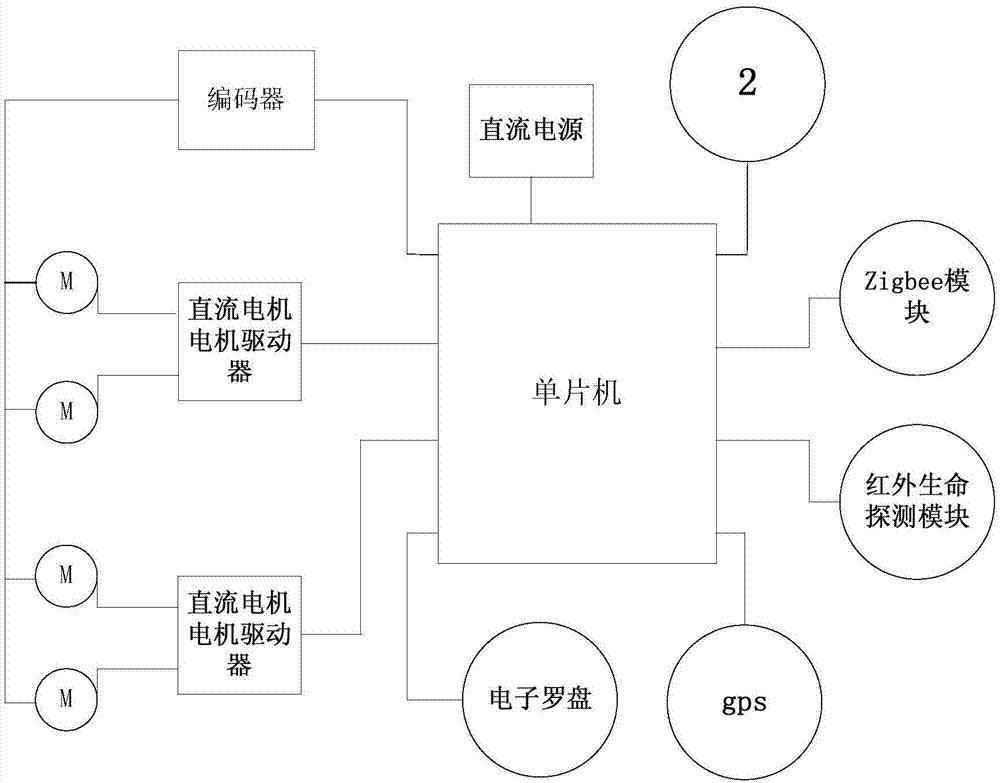
[0033] Such as figure 1 with 2 As shown, the search and rescue robot used in the search and rescue robot system motion control method based on the multi-agent theory includes an antenna 1, a camera module 2, a smart car body 3 and a tire 4; the tire 4 is arranged at the bottom of the smart car body 3; the camera module 2 It is installed on the top of the smart car body 3 to avoid obstacles; the smart car body is equipped with four geared motors M, an encoder, a DC motor driver, a GPS module with antenna, an electronic compass, a Zigbee module, and an infrared life detection module , a camera module and a DC power supply; the antenna 1 connected to the Zigbee module extends out of the top of the smart car body 3 .
[0034] The Zigbee module uses point-to-point and ZLGNET protocols (including the snap protocol). Through the serial port, each ZigBee netw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More