

Method for real-time path planning based on dynamic feedback
A technology of real-time path planning and dynamic feedback, applied in the field of navigation, to achieve the effect of improving driving efficiency and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
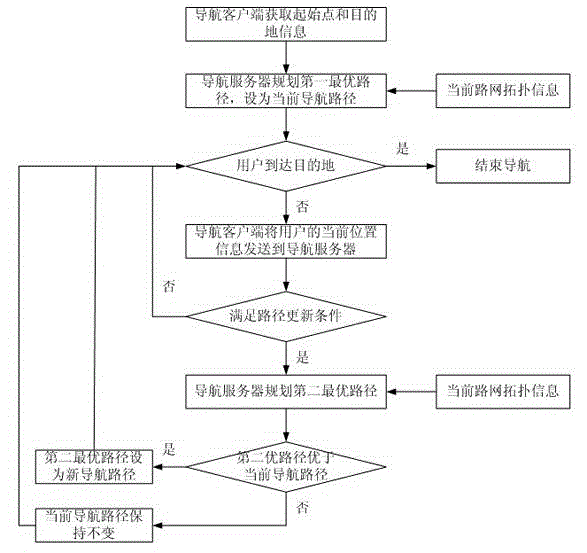
[0037] Such as figure 1 As shown, a real-time path planning method based on dynamic feedback, which includes the following steps:
[0038] S01. The user sets the judgment method of the optimal path through the navigation client, and the optimal path judgment method includes the shortest distance judgment method or the shortest time-consuming judgment method;
[0039] S02. The user sets the preset distance L through the navigation client;
[0040] S1. The navigation client acquires the user's starting point and destination information, and transmits the user's starting point and destination information to the navigation server;
[0041] S2. The navigation server obtains the current road network topology information in real time through the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More