

Planar Parallel 3D Force Sensor
A three-dimensional force and sensor technology, used in instruments, force/torque/work measuring instruments, measuring devices, etc., can solve the problem of not being able to measure the radial impact load of the bearing at the same time, not being able to measure the friction torque of the bearing at the same time, and the inability to measure the torque, etc. problem, to achieve the effect of simple structure, low cost and avoiding equipment loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
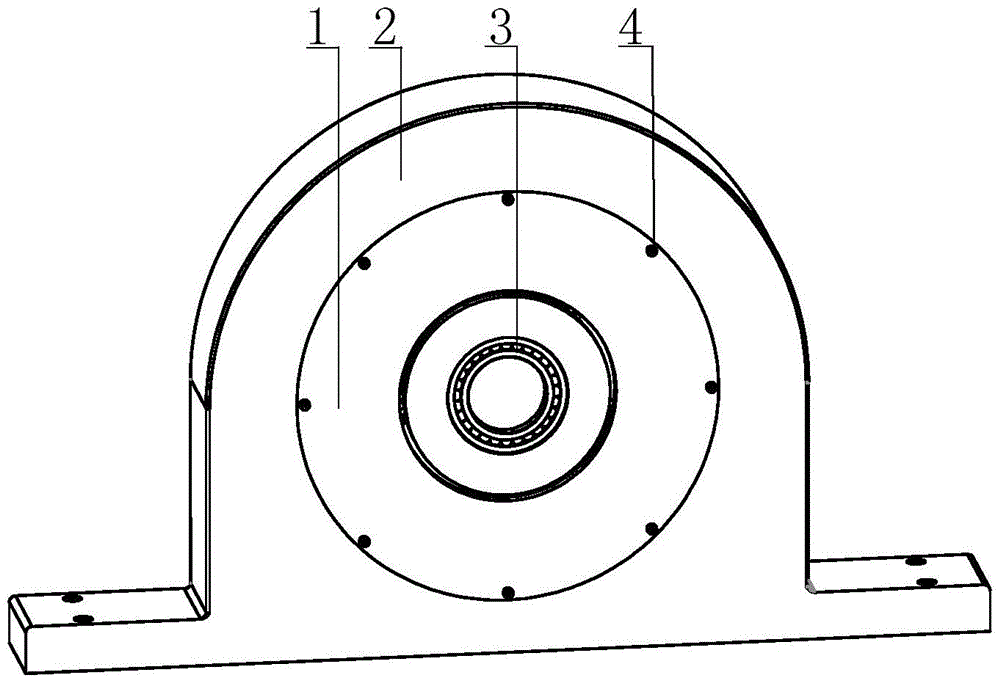
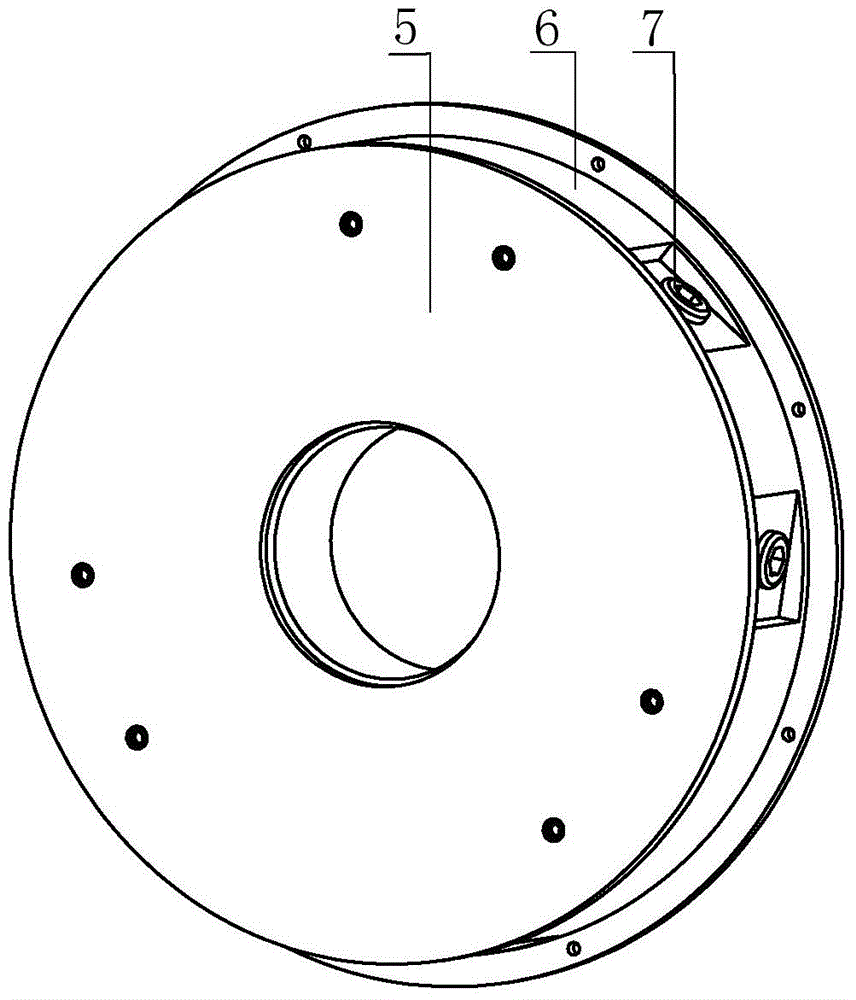
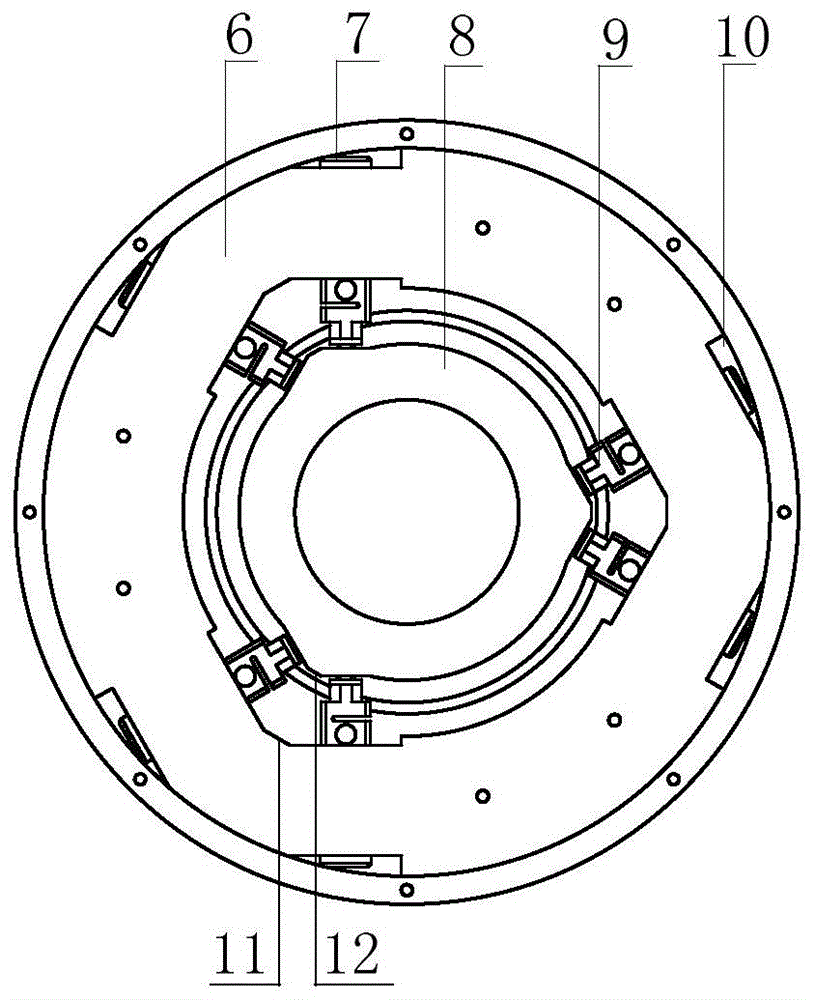
[0018] exist figure 1 In the three-dimensional schematic diagram of the use state of the plane parallel three-dimensional force sensor shown, the sensor 1 of the present invention is fixed on the bearing seat 2 by the fastener 4 through the end plate on the fixing ring, and the bearing 3 to be tested is placed in the force measuring ring . exist figure 2 , image 3 and Figure 4 In the schematic diagram of the plane parallel three-dimensional force sensor shown, three sets of symmetrical triangular notch grooves 10 are evenly distributed on the outer ring surface of the annular fixed ring 6, and the angle between the extended surfaces of the bottom of the two notch grooves is 120°, each The set of triangular notch grooves and the outer ring surface they clamp are approximately in the shape of an isosceles trapezoid, and the bottom of each set of triangular notch grooves, that is, the two waists of the trapezoid, is provided with a stepped through hole whose center line is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More