

Improved smith predicting controller
A controller and improved technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as large overshoot and poor stability of Smith predictor, and achieve the effect of solving deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
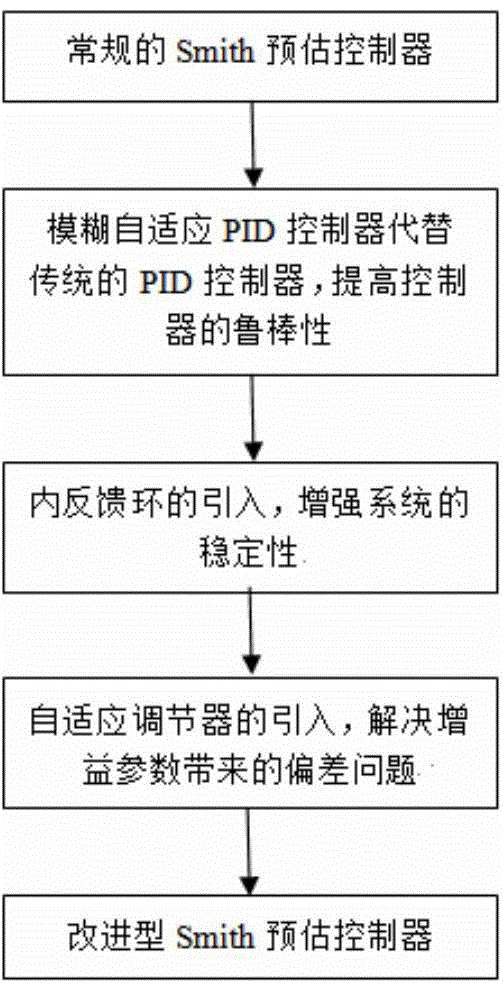
[0012] figure 1 Is the flow chart formed by the improved Smith predictor controller. The intelligent control prediction algorithm of the present invention comprises the following steps:
[0013] (1) Design a fuzzy adaptive PID controller to replace the original PID controller, which is mainly composed of a PID control regulator and a fuzzy inference engine. The error e and the error change rate ec are used as the input of the controller, and k of the PID control parameter p 、k i 、k d As an output, use the fuzzy control rules to modify the PID control parameters in real time to meet the requirements of e and ec at different times for PID parameter self-tuning.
[0014] (2) An inner feedback loop is added before the large time-delay link of the controlled system model of the conventional Smith predictor, and the feedback signal is sent to the input end of the estimated model and the actual controlled object through the inner feedback loop at the same time and communicated wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More