

A full-coefficient adaptive control method based on first-order characteristic model
A technology of adaptive control and characteristic model, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of large dynamic changes, loss of parameter tracking and adaptive ability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
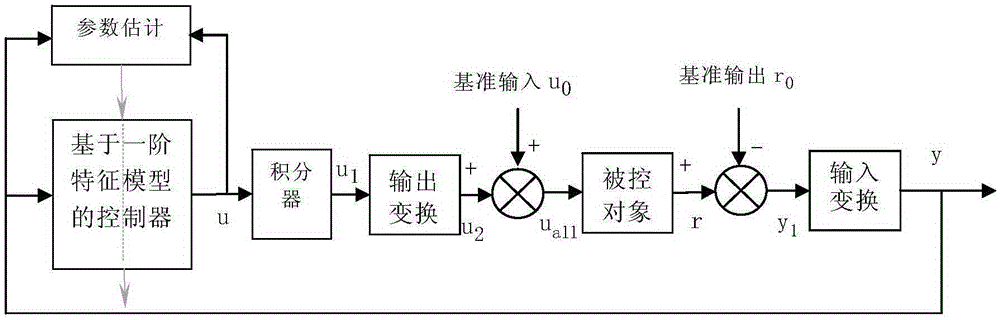
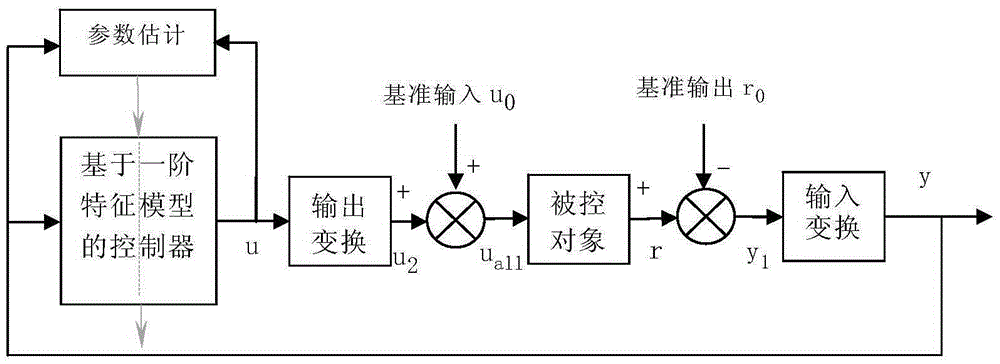
[0053] Jump reentry lift control for reentry vehicles, according to figure 1 The block diagram shown designs a full-coefficient adaptive controller based on the first-order characteristic model, and the reference input is the nominal roll angle, u 2 is the lift feedback control quantity; the input is transformed into The output transforms to A takes a value of 36, and D(tcf) is a known dynamic gain function.
[0054] After multiple iterations of design and mathematical simulations, it was determined that α =0.3, λ 1 =1, λ 2 = 4, F θ1 =0.1, L=0.012, λ=1. The actual flight has achieved good results and achieved the expected goal. The parachute opening point error is 680m, and the control accuracy ranks at the international leading level.
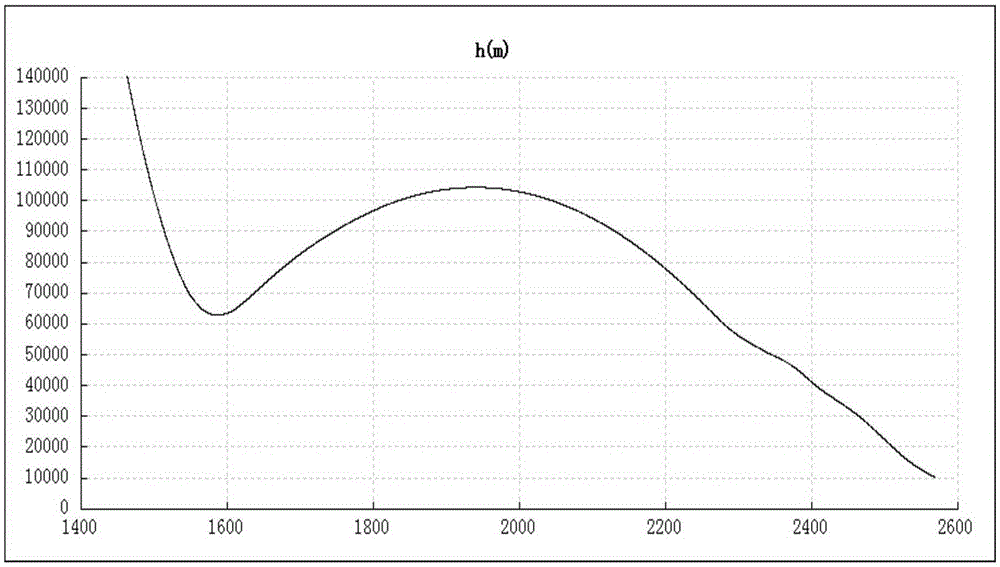
[0055] Figure 3-6 The height curve, speed curve, axial apparent velocity increment curve and axial overload curve are given respectively. from Figure 3-6 It can be seen that the returner realizes a perfect jumping reentry, the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More