

Walking piezoelectric rotary motor
A rotating motor and walking technology, applied in piezoelectric effect/electrostrictive or magnetostrictive motors, electrical components, generators/motors, etc., can solve the problem of low miniaturization, insufficient driving force, poor stability, etc. problems, to achieve the effect of low difficulty in miniaturization, compact structure, and large torsional displacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
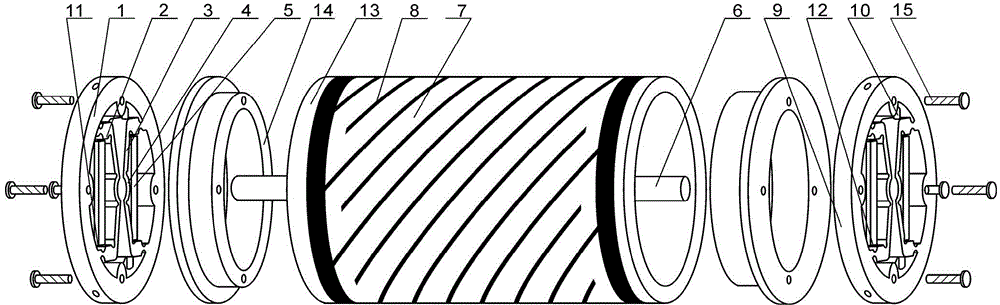
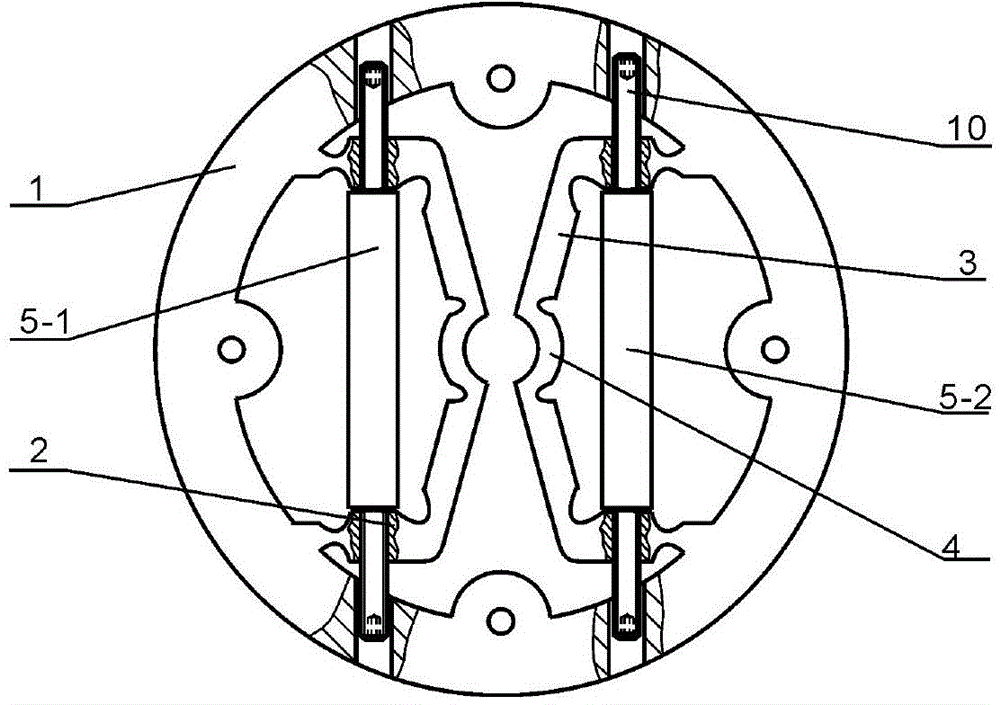
[0034] In this embodiment, the piezoelectric stack 5 is stretched and deformed under voltage driving, and the bearing ring 4 is driven to realize small movements such as clamping and loosening. By controlling the clamping and loosening timing of the piezoelectric stack 5 and the piezoelectric torsion driver 13 The timing of the torsional movement realizes the stepping movement of the rotary axis. Such as figure 1 and figure 2 As shown, the sleeve 14 is bonded to the piezoelectric torsion driver 13 through epoxy glue or AB glue, and the piezoelectric clamp bearing drive module 11 and the piezoelectric clamp bearing drive module 12 are connected to the sleeve 14 through screws 15, Therefore, the piezoelectric torsion driver 13 , the piezoelectric clamp bearing drive module 11 and the piezoelectric clamp bearing drive module 12 are closely connected. If the middle part of the piezoelectric torsion driver 13 is fixed, the stepping of the rotating shaft 6 is realized by controll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More