Wheel-leg composite type four-leg robot
A quadruped robot and hybrid technology, applied in the field of robotics, can solve the problems of poor adaptability to unknown environments, long application distance, slow speed, etc., and achieve the effect of large load, ensuring rigidity requirements, and reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
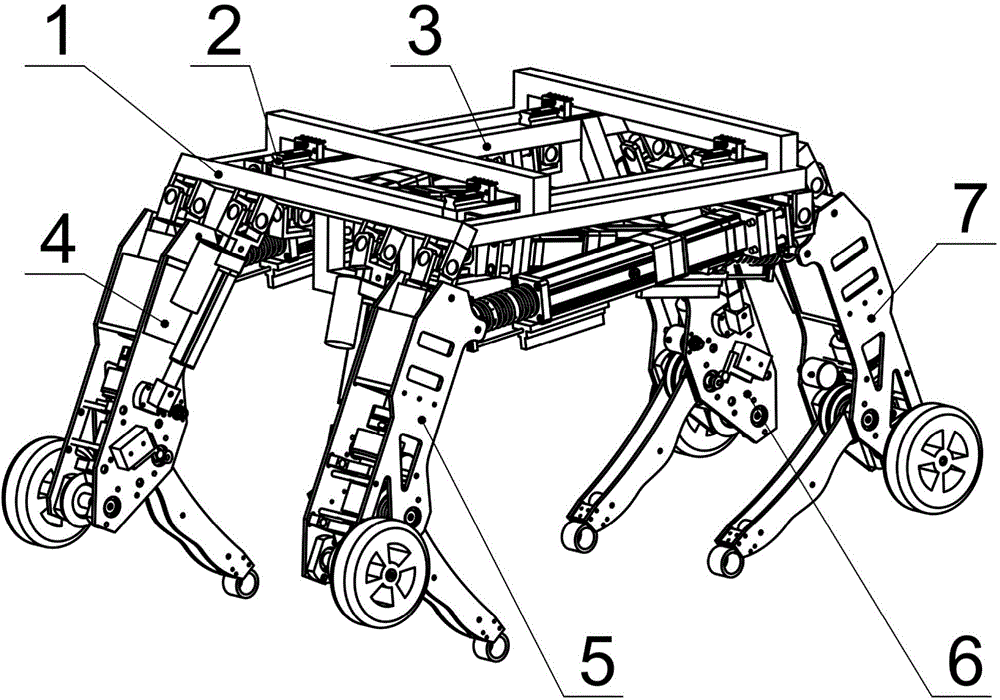
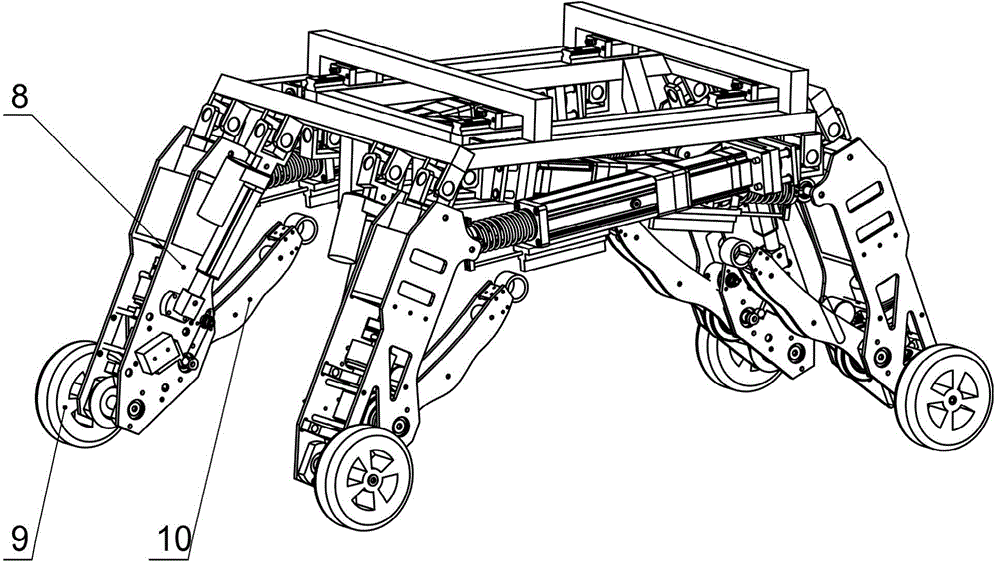
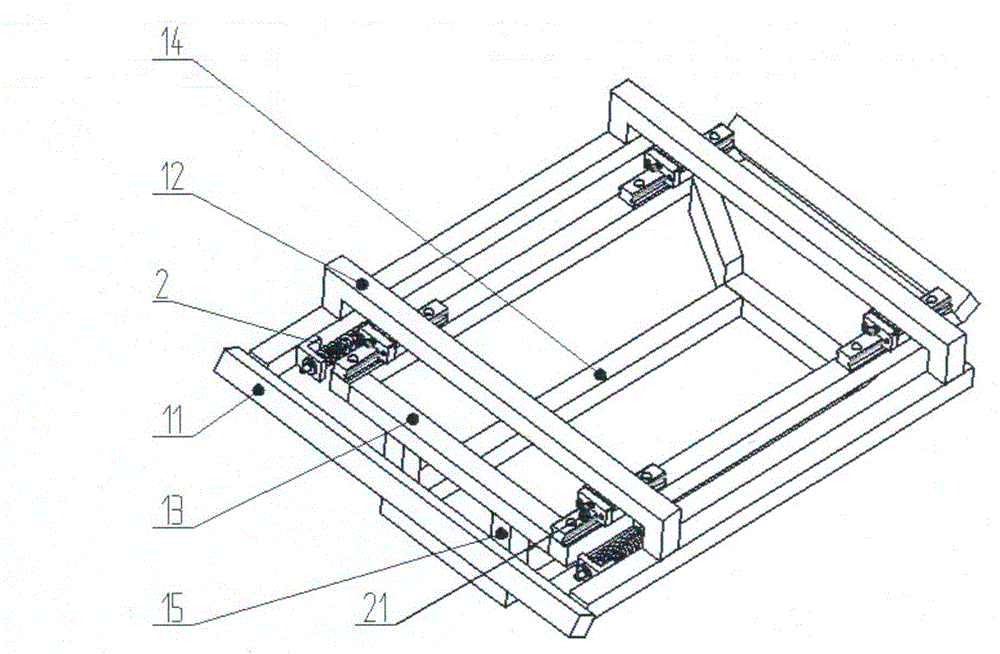
[0027] exist figure 1 and figure 2 In the three-dimensional schematic diagram of the wheel-leg hybrid quadruped robot shown, the wheel-leg hybrid quadruped robot mainly includes: an outer frame 1, a buffer assembly 2, an inner frame 3, two pairs of thigh parallel assemblies and four structurally complete Same wheeled legs 4,5,6,7. exist image 3 Among them, the outer frame 1 has a door-shaped frame 11 with an open rear end, and two parallel bars are respectively provided with two longitudinal bars 12 vertically connected to it, and there is a certain gap between the bars and the main bodies of the bars. . The inner frame 3 located in the outer frame 1 has a rectangular upper frame 13 which is in the same plane as the outer frame and corresponds to it. A rectangular lower frame 14 is arranged below the upper frame. 15 connected. exist Figure 4 In the partially enlarged three-dimensional schematic diagram of the buffer assembly of the present invention shown, the above-m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



