

Robot force position compliant control method based on intelligent algorithm
An intelligent algorithm and compliant control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as inaccurate robot models and inability to obtain satisfactory control quality, so as to improve anti-interference, accuracy, and fast response Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
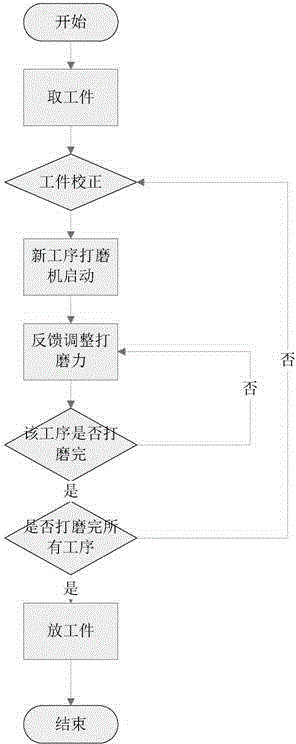
[0038] Such as figure 1 As shown, the robot force-position compliance control method based on intelligent algorithm, the control method is as follows:
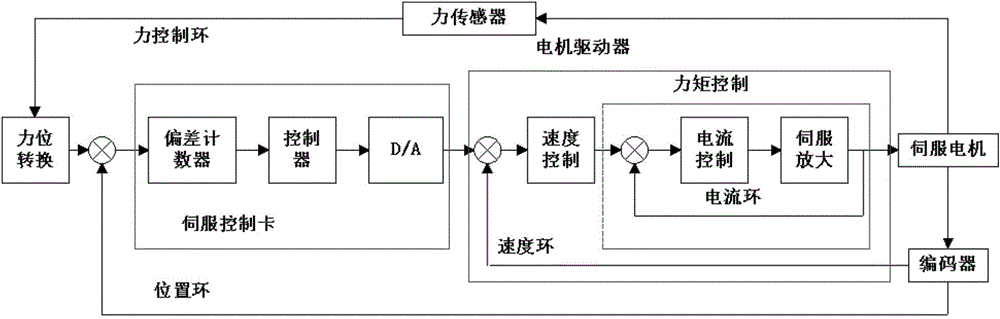
[0039] The position-based impedance control method of the control system measures the current of the servo motor and the rotational position of the joint, and uses the RBF neural network algorithm to predict the interaction force value between the robot and the environment. The energy balance state is input, and the output processed by the energy balance correction algorithm is the actual force of the control system. Sensing, the control system sets the position of the assembly track based on this, and forms a servo motor control signal, so as to control the servo motor and realize the soft control of force and position.
[0040] The control system includes motion controllers, drivers and motors, as well as related software and algorithms,
[0041] Before starting work, it is necessary to calibrate the torque of each joint to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More