

Genetic algorithm optimization-based vehicle rear-end collision fuzzy control method
A genetic algorithm and fuzzy control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as the difficulty of precise mathematical models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0069] The application principle of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
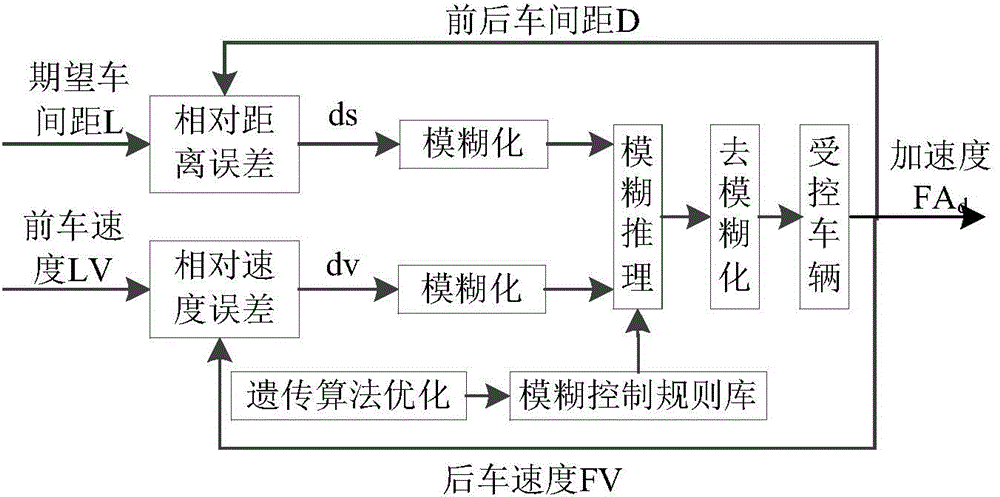
[0070] Such as figure 1 As shown, the fuzzy control method of vehicle rear-end collision collision based on genetic algorithm optimization in the embodiment of the present invention comprises the following steps:
[0071] The present invention designs a double-input and single-output fuzzy controller. Select the relative distance error ds and the relative speed error dv of the front and rear vehicles as the input variables of the fuzzy controller, and the actua...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More