

Permanent magnet synchronous motor full-order sliding mode variable structure position servo control method based on extended state observer
A technology of permanent magnet synchronous motor and expansion state, which is applied in the direction of motor generator control, electronic commutation motor control, control system, etc., and can solve the problems of existing, affecting the precise positioning and position tracking performance of the motor system, and the control gain is too high
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with the accompanying drawings.
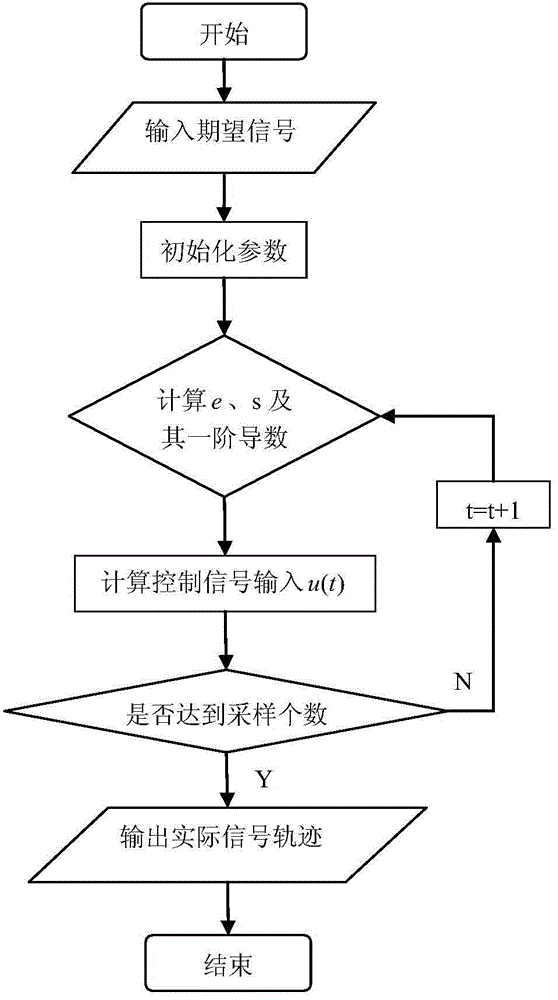
[0065] refer to Figure 1-Figure 5 , a full-order sliding mode variable structure position servo control method for permanent magnet synchronous motors based on extended state observers, including the following steps:
[0066] Step 1, establish a permanent magnet synchronous motor system, initialize the system state and related control parameters;
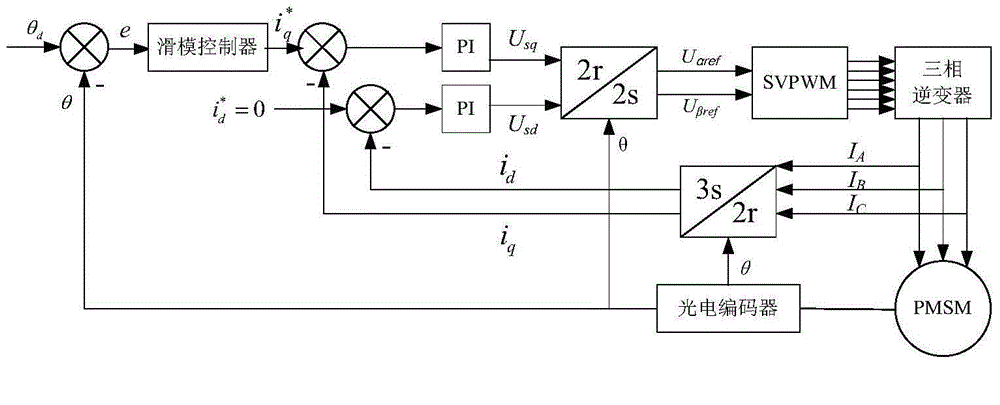
[0067] 1.1, in the d / q rotating coordinate system, the voltage equation, torque equation and motion equation of the permanent magnet synchronous motor are respectively:
[0068] u d = Ri d - ω p n L ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More