Intelligent self-positioning system of spraying robot
A spraying robot, intelligent and autonomous technology, applied in the direction of using feedback control, etc., can solve the problems of lack of environmental perception and adaptability, limit the application of robots, etc., to achieve the effect of convenient installation and debugging, improved positioning accuracy, and simple system structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
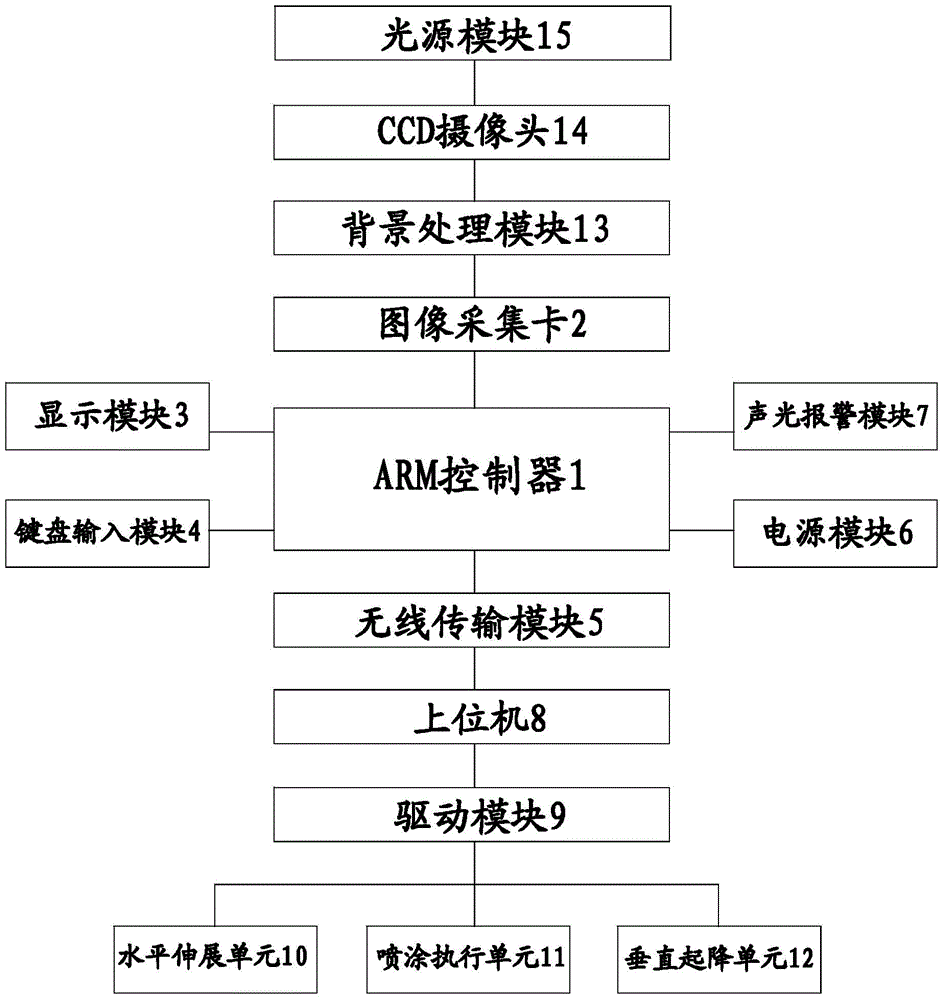
[0009] figure 1 It is a structural schematic diagram of the intelligent autonomous positioning system of the spraying robot of the present invention. The intelligent autonomous positioning system of the spraying robot includes an ARM controller 1, an image acquisition card 2, a display module 3, a keyboard input module 4, a wireless transmission module 5, a power supply module 6, an acousto-optic Alarm module 7, host computer 8, drive module 9, horizontal extension unit 10, spraying execution unit 11, vertical take-off and landing unit 12, background processing module 13, CCD camera 14, light source module 15; where:
[0010] The ARM controller 1 is respectively connected with the image acquisition card 2, the display module 3, the keyboard input module 4, the wireless transmission module 5, the power supply module 6, and the sound and light alarm module 7, The upper computer 8 is respectively connected with the wireless transmission module 5 and the driving module 9, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com