

Monocular visual error measurement system for cooperative target and error limit quantification method
A technology of cooperative target and error measurement, applied in photogrammetry/video metrology, measuring devices, surveying and mapping and navigation, etc., can solve problems without in-depth analysis and demonstration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
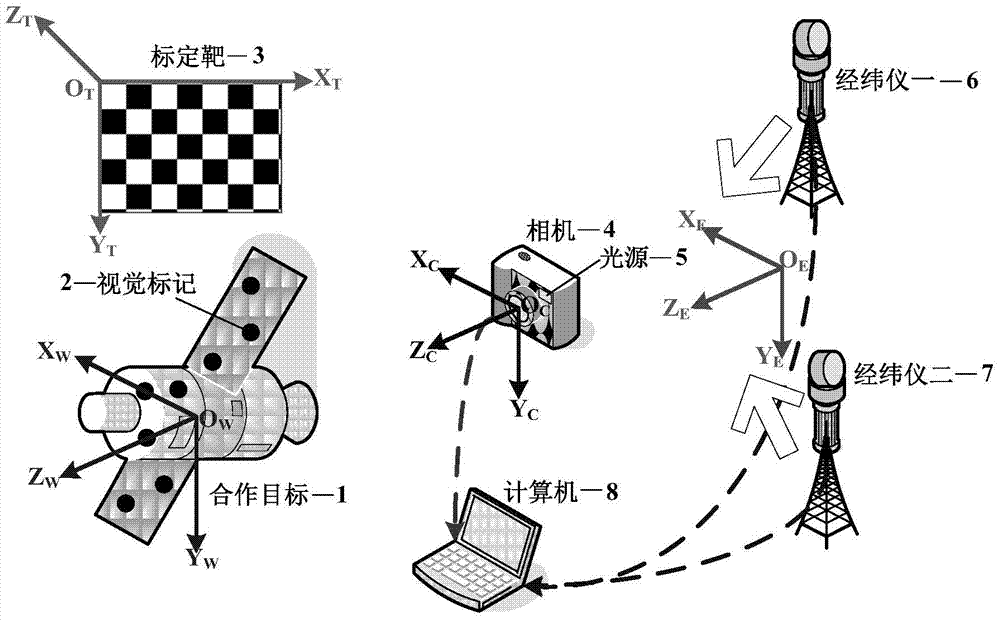
[0038] Embodiment 1, the composition of the cooperative target monocular vision measurement error distribution system of the present invention is as follows figure 1 As shown, it includes cooperation target 1, visual marker 2, calibration target 3, camera 4, light source 5, theodolite one 6, theodolite two 7, and computer 8. The outer surface of the cooperation target 1 is equipped with visual markers 2, including a limited number of marker points ( figure 1 ), which is the main observation object of camera 4. The calibration target 3 adopts a black and white checkerboard pattern, provides a limited number of known characteristic corner points, and assists in calibrating the internal and external parameters of the camera 4 . The camera 4 is mainly used to collect the image of the observation target (visual marker 2 or calibration target 3) in a single frame and transmit it to the computer 8. It is equipped with a light source 5, which can effectively compensate the spatial li...
Embodiment 2
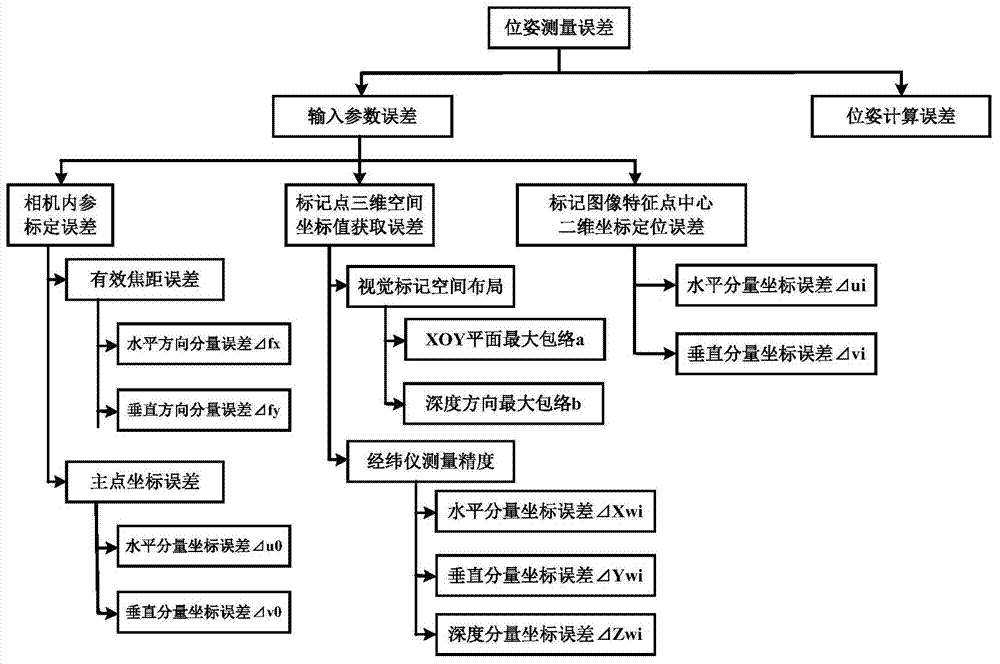
[0058] Embodiment 2, the cooperative target monocular vision measurement error distribution system provided by the present invention, wherein the decomposition block diagram of the influencing factors of the error is as follows figure 2 shown.
[0059] In the function four of computer 8, the measurement error obtained by calculation is expressed as (Δt x ,Δt y ,Δt z ,Δα,Δβ,Δγ), taking the optical center of camera 4 as the origin, and the optical axis as Z c axis, the horizontal and vertical directions of the image plane captured by camera 4 are respectively X c Axis and Y c Axis, establish the target coordinate system O with the center of mass of the cooperative target 1 as the origin w -X w Y w Z w , X w , Y w ,Z w The axes in turn correspond to the X c , Y c ,Z c axis parallel; then t x ,t y ,t z X in the coordinate system of the cooperative target along the target W , Y W ,Z W The translational components of the axis, α, β, γ are respectively the coordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More