

DMP-based robot workspace adaptive walking control system and method
A technology of workspace and walking control, applied in the field of bionic control, to achieve the effect of reducing complexity and calculation difficulty, avoiding tediousness, and improving efficiency and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
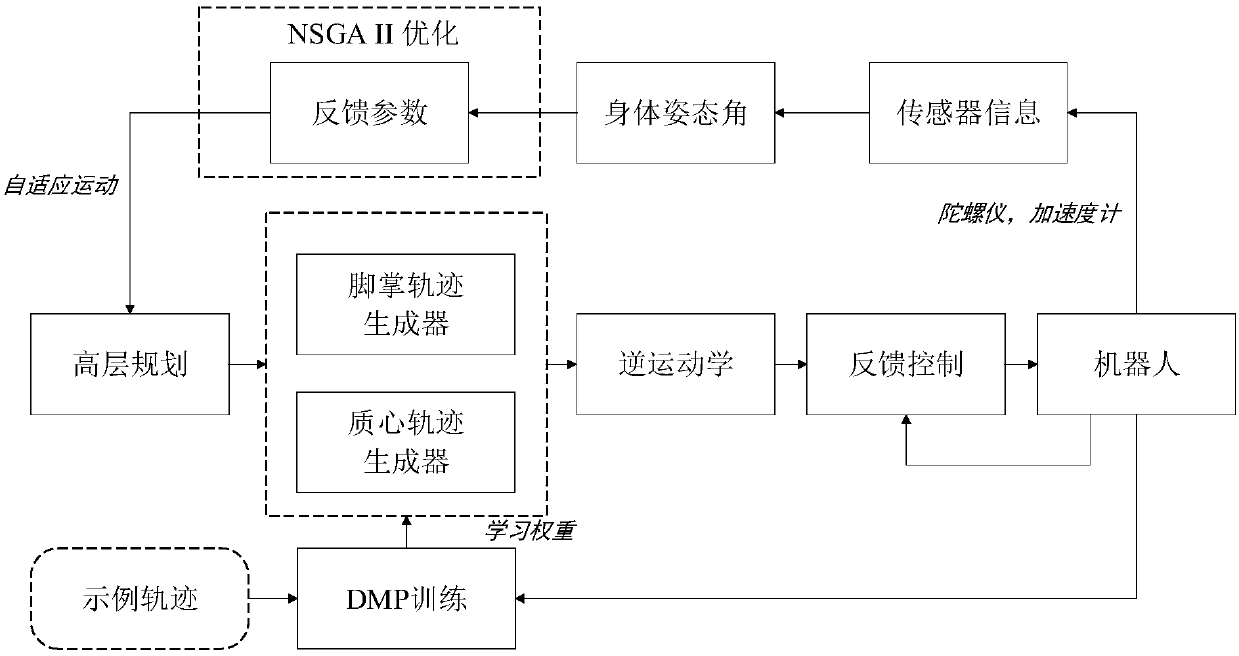
[0055] Taking the humanoid robot NAO as an example, the DMP-based workspace trajectory generation method proposed by the present invention and its application in the adaptive walking of the NAO robot will be described.
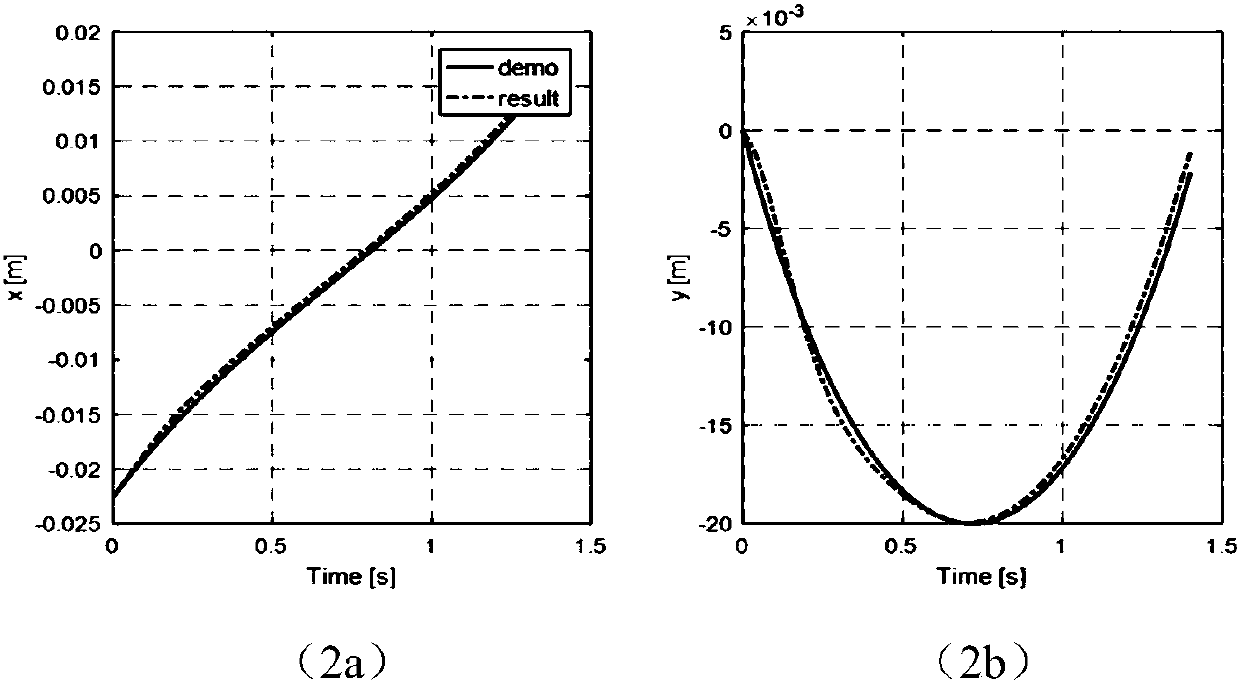
[0056] (1) Robot centroid trajectory generator based on DMP
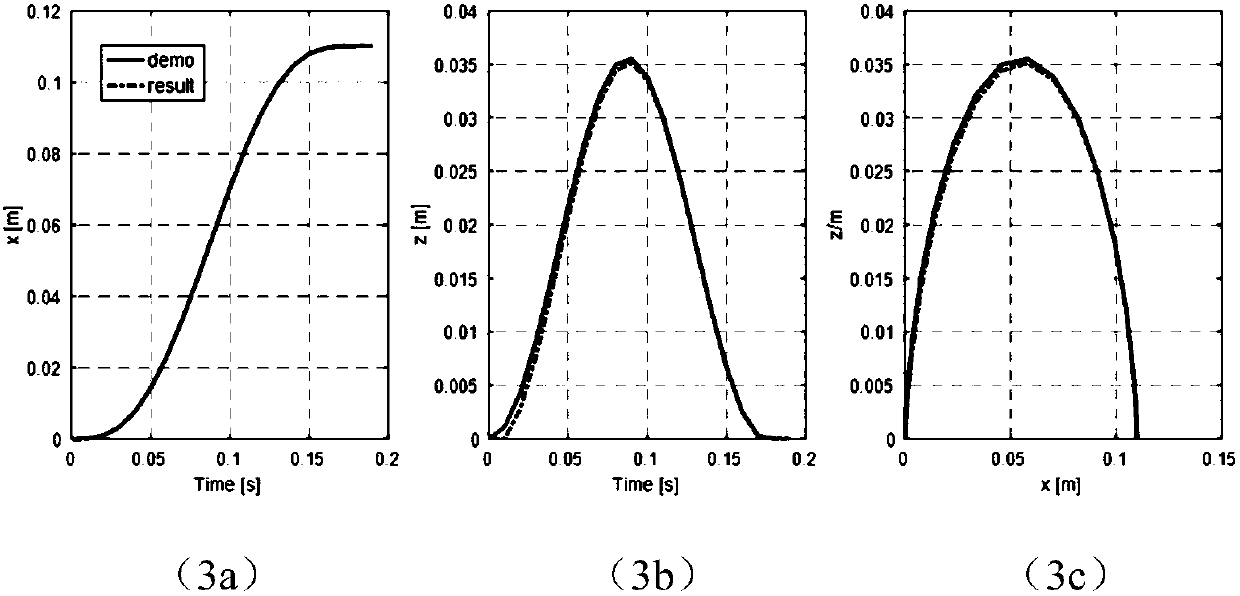
[0057] The DMP model selected in this embodiment is a nonlinear system with good target attraction. In the trajectory generator of the center of mass of the robot, two DMP units are used to generate trajectories in the x and y directions, and the z direction can be obtained by mapping the sole trajectory without design. The specific description of each DMP unit is as follows:
[0058] Transfer system:
[0059]
[0060]
[0061] Specification system:
[0062]
[0063]
[0064]
[0065] Among them, x, y, z are 3 variables, y, z, The position, velocity and acceleration in the system can be expressed separately, τ represents the time constant, y 0 Represents the initial position of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More