

Attitude determination and virtual reality roaming method of intelligent machine
A measuring method and technology of intelligent machine, applied in the field of information, can solve the problems of no longer applicable, laborious real scene and map association, inconvenient for globalization and popularization, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
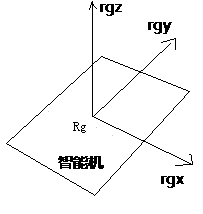
[0307] The present invention requires sensor input for 3 configuration types of smart machines for 3 methods
[0308] Method (1) Use the following formula R g = Calculate R g
[0309] in
[0310] R θ =
[0311]
[0312] =
[0313] Calculate Azimuth Angle Using Magnetometer The trigonometric functions of are:
[0314]
[0315] In actual operation, if the geomagnetic declination △ As a result, the direction of the magnetic force is not pointing to true north, and R can be calculated by the following formula g
[0316]
[0317] R g =
[0318] The three values of the gravity accelerometer sensor {v ax , v ay , v az}Requires the lowest configuration and has the widest applicability;
[0319] The three values of the magnetometer sensor {v mx , v my , v mz} or heading angle value[0] of direction sensor
[0320] If there is neither a magnetometer nor an orientation sensor, The angle can be increased or decreased by the user interf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More