

Six-degree-of-freedom series- reduction robot for fracture of pelvis
A pelvic fracture and robot technology, applied in medical science, surgery, etc., can solve problems such as poor operability, inability to actively complete pelvic reset, and poor pertinence, so as to reduce labor intensity, compact structure, and reduce exposure to radiation. Dangerous Effects of Radiation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
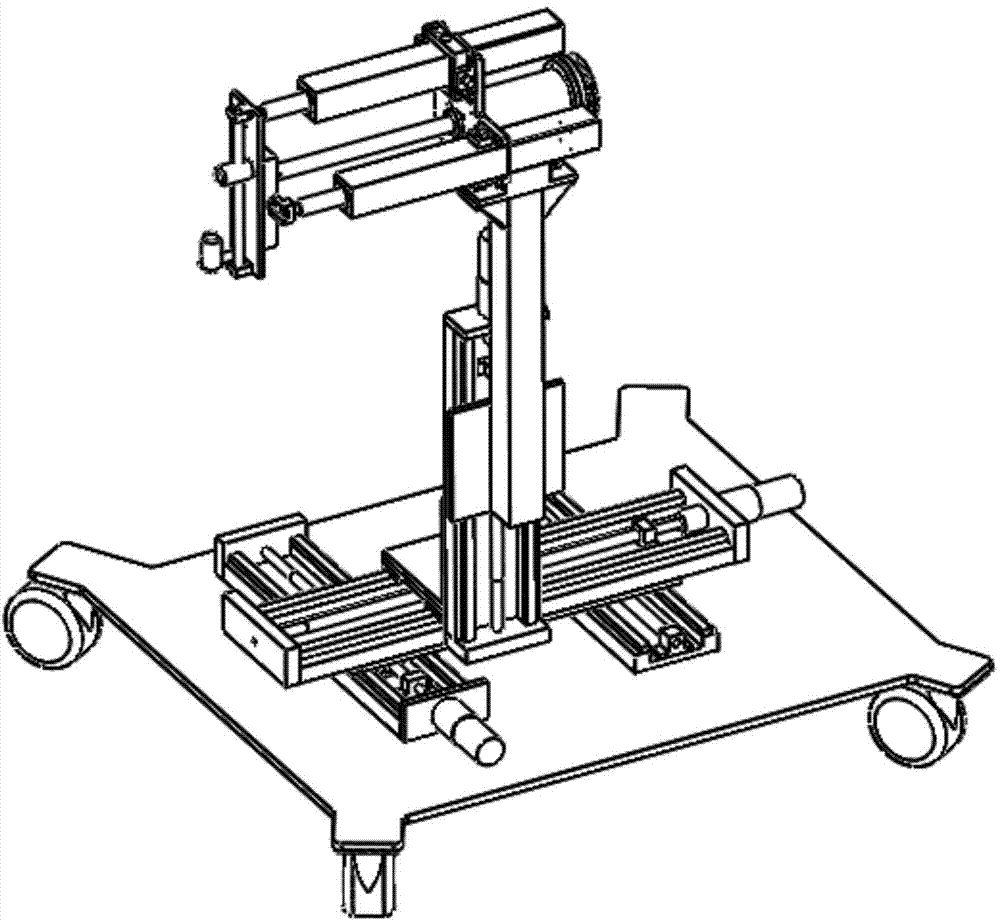
[0033] The overall structure of the present invention is as Figure 1 to Figure 10 shown.
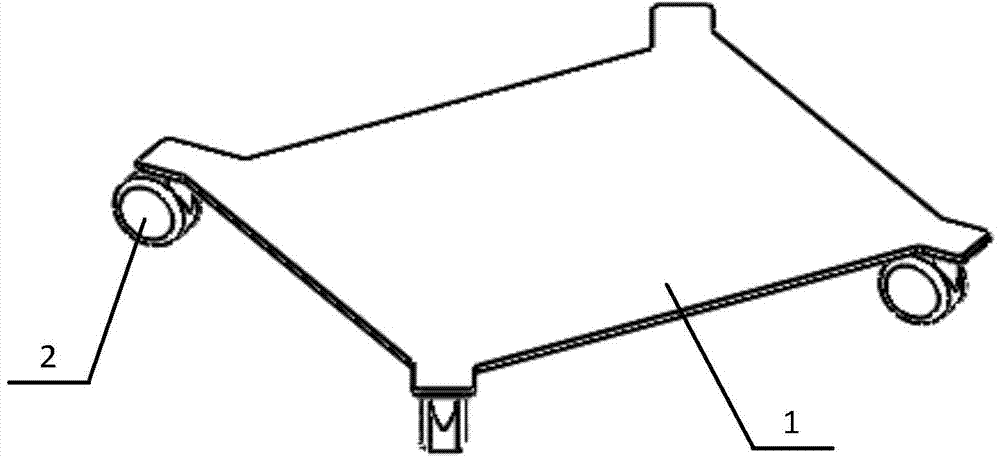
[0034] A six-degree-of-freedom series-parallel pelvic fracture reduction robot consists of a chassis assembly, a series platform assembly, a series-parallel connection assembly, a parallel platform assembly, and an external fixator assembly. The universal wheel 2 in the base plate assembly can walk straight or turn.
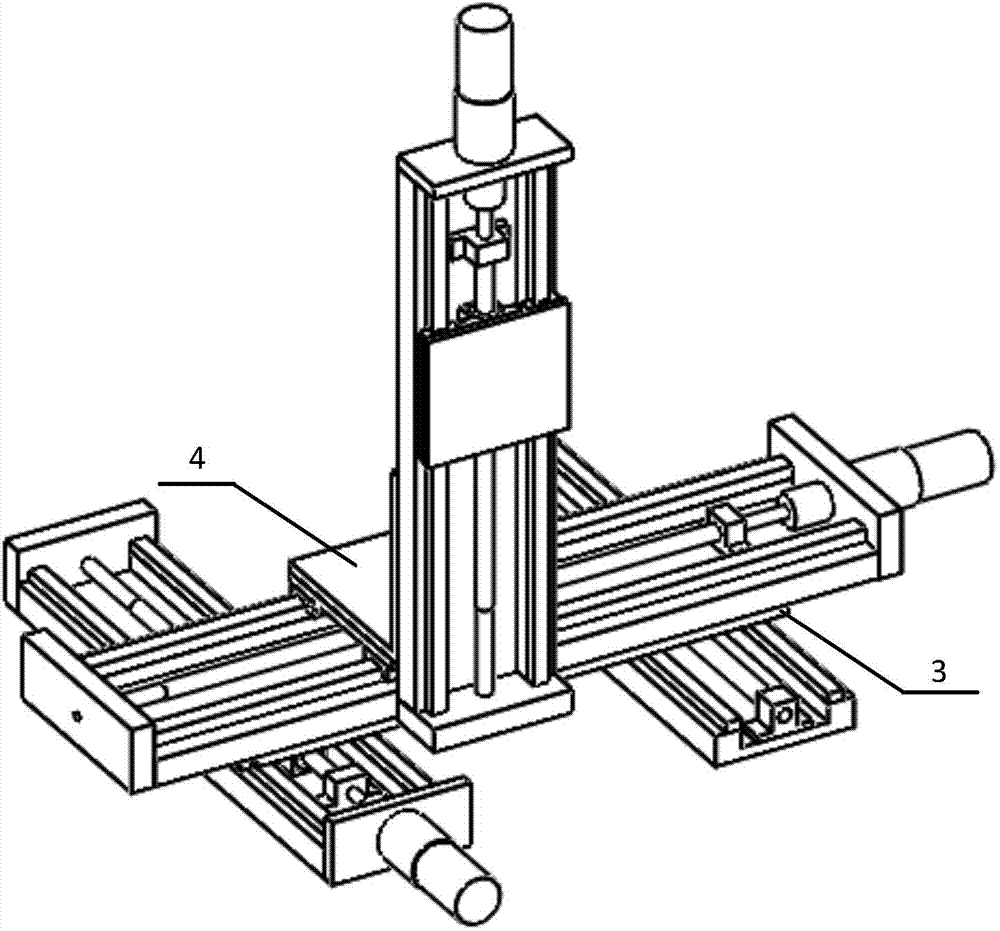
[0035] The slider 14 in the linear motion unit assembly can move linearly along the guide rail 10, and the motor 7 can drive the screw rod 11 to rotate through the coupling 8. Since the screw drive nut 15 and the screw rod 11 are threaded, the screw drive nut 15 can convert the rotary motion of the screw rod 11 into the linear movement of the screw drive nut 15 and the slider mounting plate 13 and the slider 14 fixedly connected thereto ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More