

Spherical mechanism for quad-rotor amphibious robot
A robot and quadrotor technology, applied in the field of robots, can solve the problems of no integration of different motion modes, no consideration of robot protection, only applicable protection systems, etc., to achieve the effect of simple structure, practical function and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
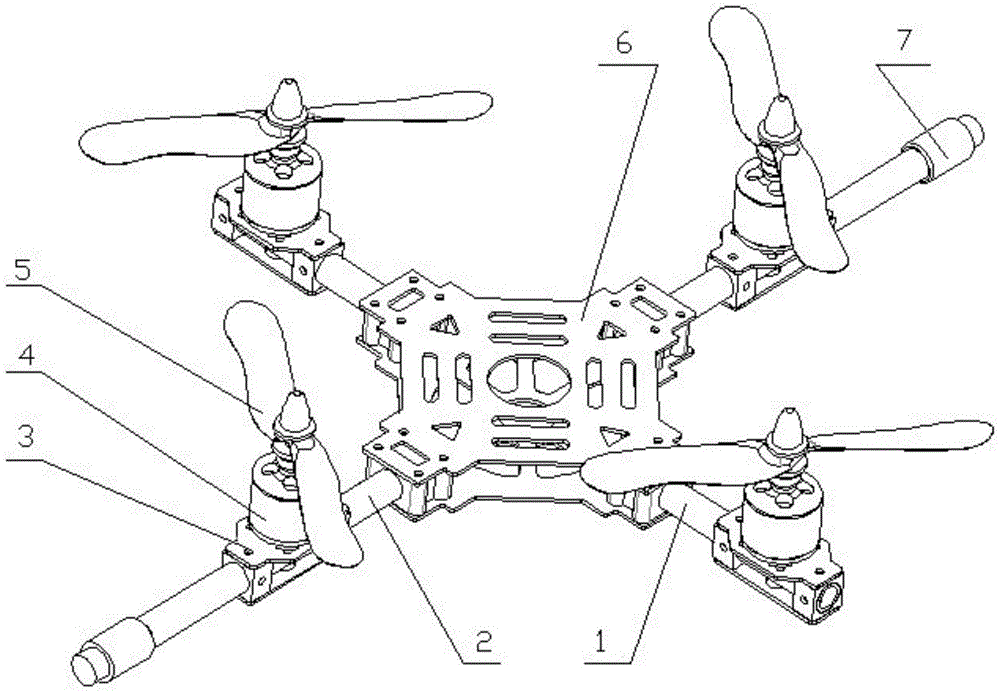
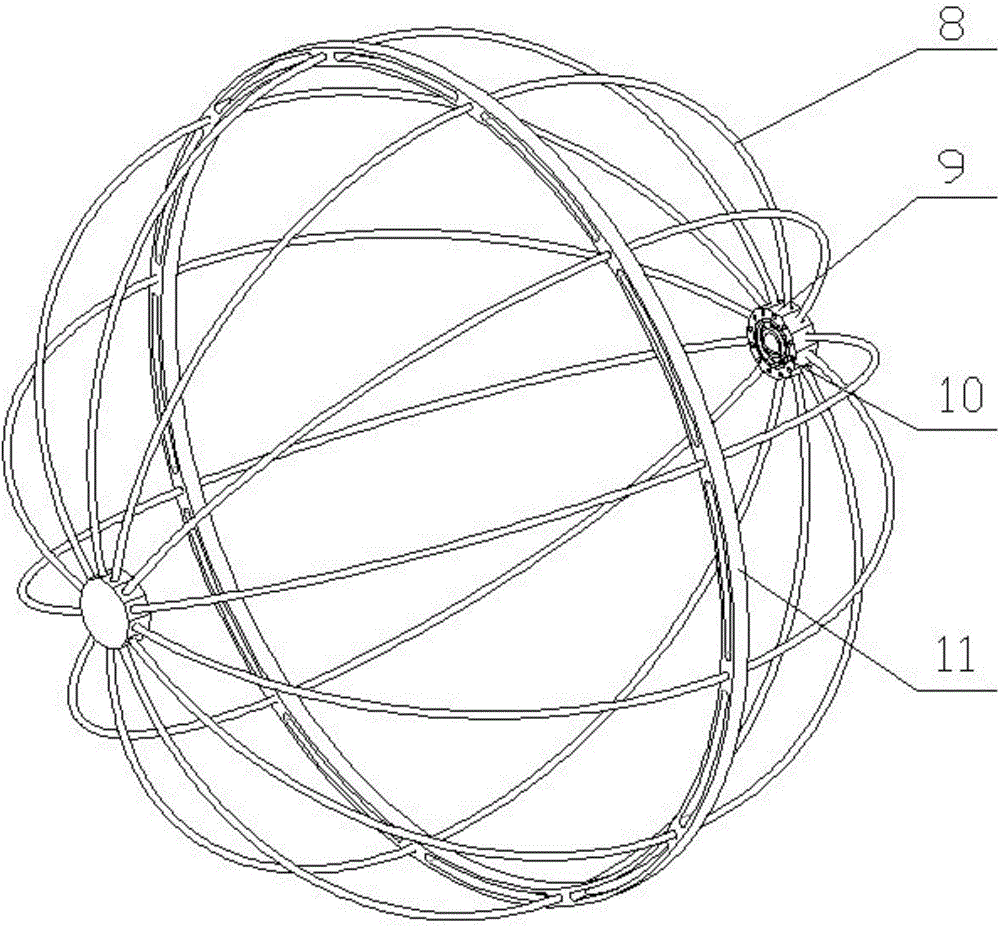
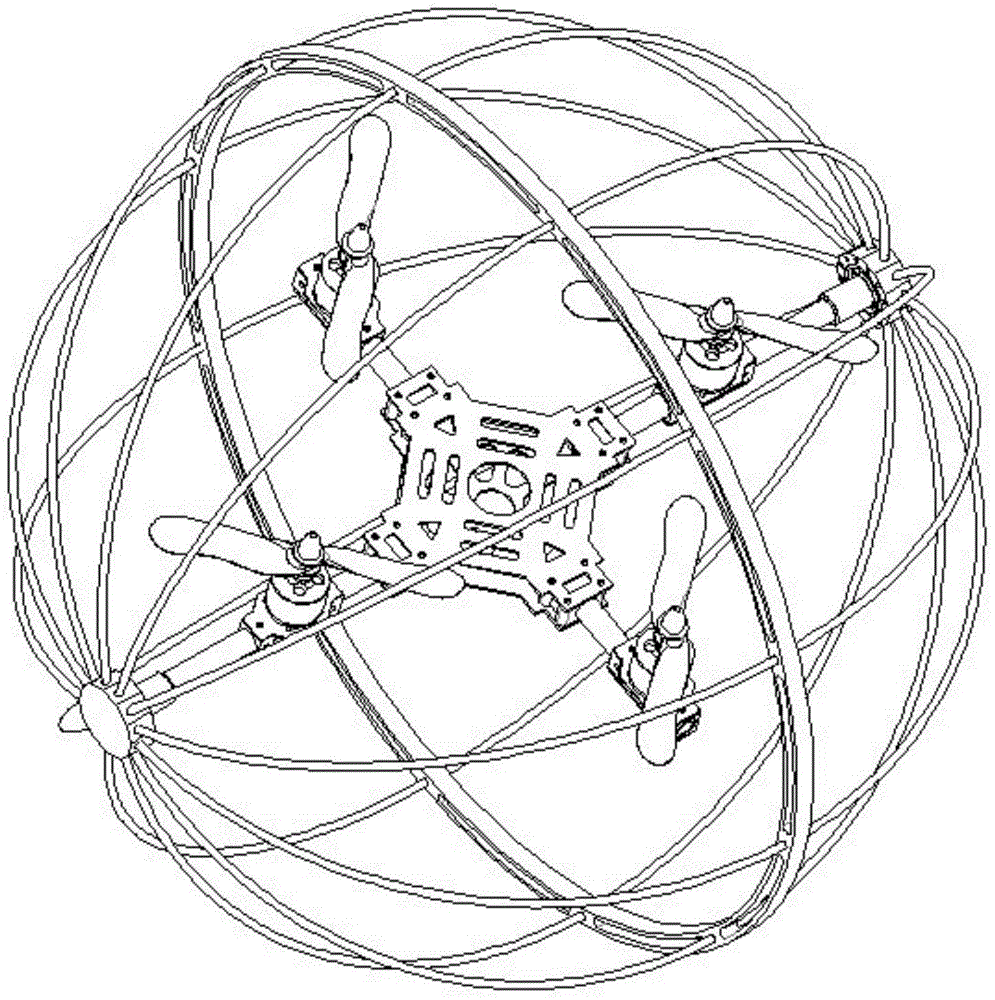
[0018] see Figure 1-Figure 4 , in an embodiment of the present invention, a spherical mechanism of a four-rotor amphibious robot mainly consists of a rotor mechanism and a spherical shell mechanism.
[0019] figure 1 It is the rotor mechanism in the spherical mechanism of the four-rotor amphibious robot of the present invention, mainly composed of a short axis 1, a long axis 2, a motor base 3, a motor 4, a rotor 5, a base 6 and a connecting shaft 7, the short axis 1 and the long axis 2 are perpendicular to each other and the axes are in the same plane, the intersection of the axes coincides with the center of the base 6, the motor base 3 is fixed on one side of the long axis 2, the motor 4 is fixed on the motor base 3, and the rotor 5 is fixed on the rotating shaft of the motor 4. The set of motor base-motor-rotor is evenly distributed on the short axis 1 and the long axis 2 around the base 6, and two connecting shafts 7 are installed at both ends of the long axis 2. The ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More