Multiple-pose lower limb rehabilitation training robot
A technology for rehabilitation training and robotics, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of optimal design of prescription for rehabilitation training, difficulty in meeting the training needs of paralyzed patients at the same time, and achieve the effect of improving comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
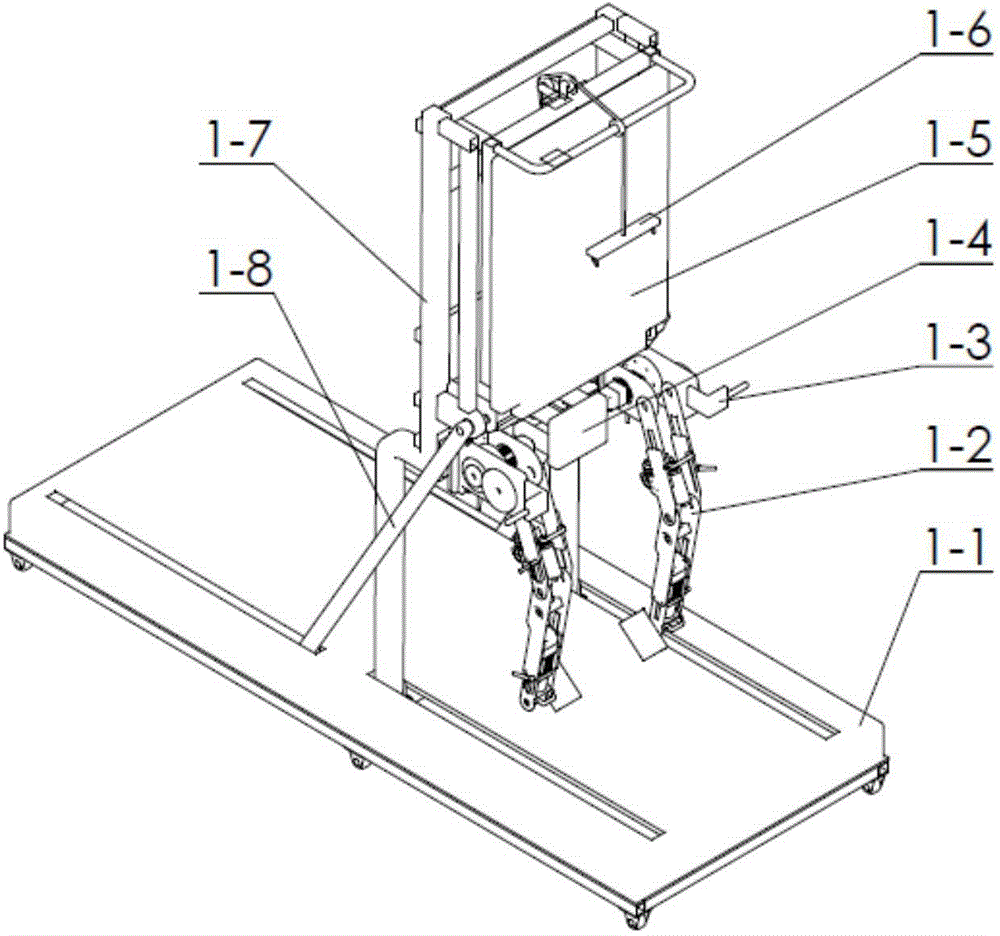
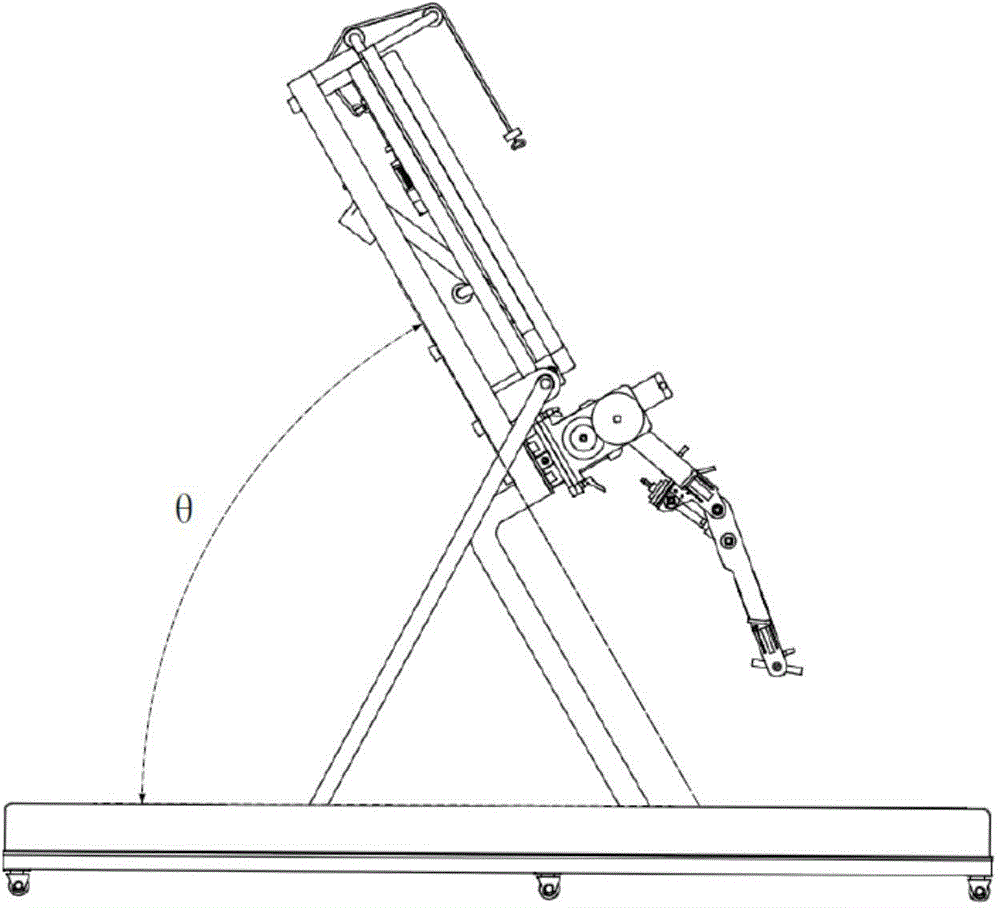
[0030] Figure 1.1 It is an overall structural diagram of a multi-position lower limb rehabilitation training robot according to an embodiment of the present invention. The multi-position lower limb rehabilitation training robot mainly includes two modules of a robot base 1-1 and a training bed. For the convenience of description, each part in this embodiment takes the side of the training bed close to the human body as the front, and the side away from the human body as the back; the position of each part of this embodiment is carried out based on the up-down relationship of each part in the vertical state of the training bed. describe. The robot base 1-1 is the base of the multi-position lower limb rehabilitation train...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More