

Magnetorheological fluid indirect-adaptive underactuation robot finger device
A robot finger and magneto-rheological fluid technology, applied to manipulators, chucks, manufacturing tools, etc., can solve the problems of grasping failure, inability to grasp, and small grasping force at the end, achieving low assembly and maintenance costs, Good gripping effect, easy control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The specific structure, working principle and working process of the present invention will be further described in detail below with reference to the drawings and embodiments.
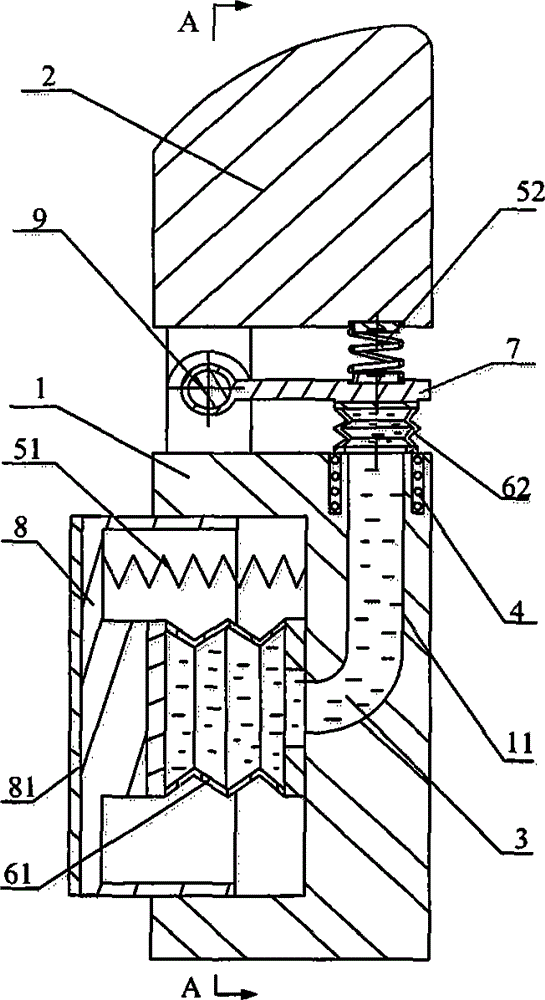
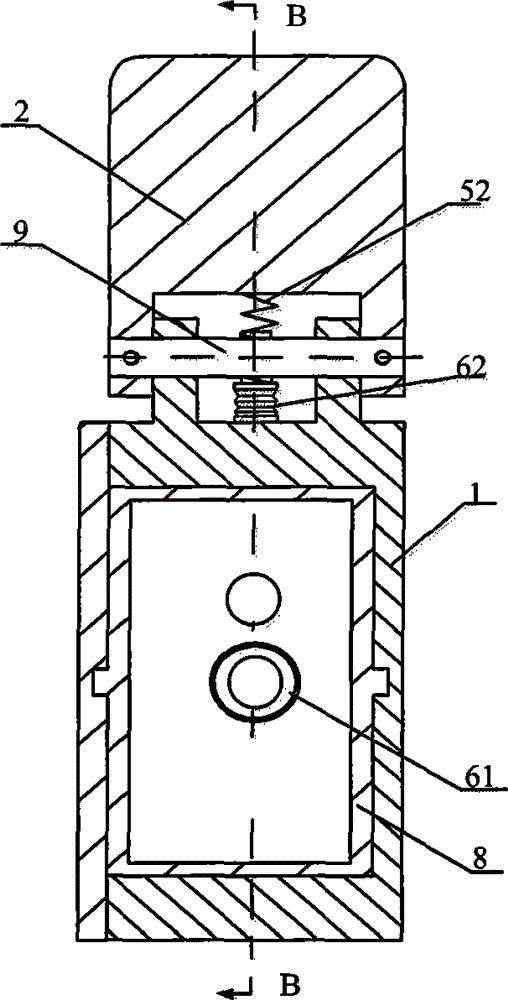
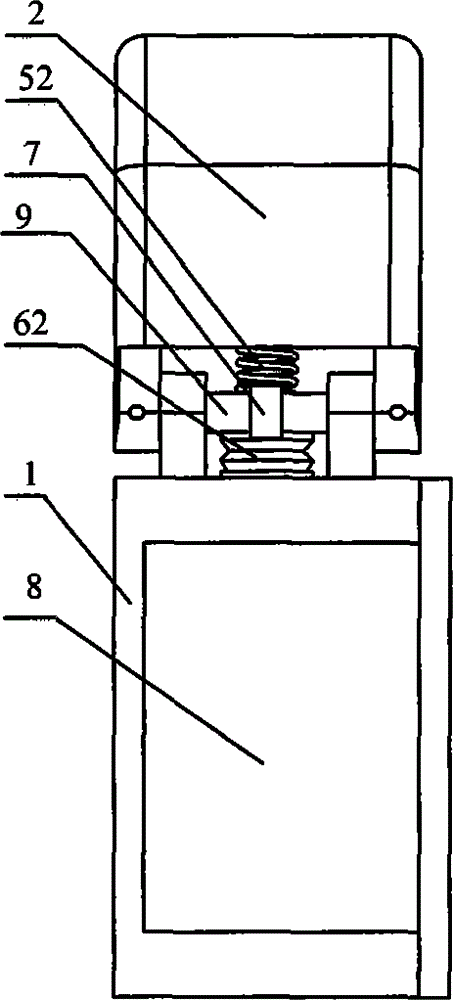
[0051] An embodiment of the magnetorheological fluid indirect adaptive under-actuated robot finger device designed in the present invention, such as figure 1 , figure 2 , image 3 , Figure 4 with Figure 5 As shown, Image 6 Yes figure 1 The exploded view of the illustrated embodiment includes a first finger segment 1, a second finger segment 2, a magnetorheological fluid 3, a coil 4, a first spring member 51, a second spring member 52, a first flexible member 61, and a second The flexible member 62, the shift block 7, the active sliding block 8 and the joint shaft 9; the joint shaft 9 is sleeved in the first finger segment 1, and the second finger segment 2 is sleeved on the joint shaft 9; The slider 8 is slidably embedded in the first finger section 1. A channel 11 is provided in the first fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More