

General chassis steering gear
A technology of steering gear and chassis, which is applied in steering mechanism, non-deflectable wheel steering, transportation and packaging, etc. It can solve the problems of difficult processing, high equipment cost, complicated control, etc., and achieves simple structure, flexible steering and wide application Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
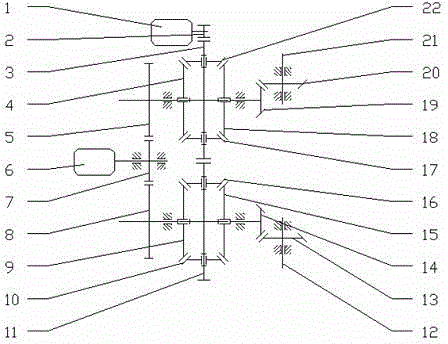
[0031] like figure 1 As shown, the universal chassis steering gear of the present invention includes a front and rear drive motor 1 and a steering drive motor 6. The front and rear drive motors 1 drive the first differential planet carrier gear 3 through the front and rear input gears 2, and the first differential A first differential first planetary bevel gear 22 and a first differential second planetary bevel gear 17 are fixed axially and vertically on the carrier gear 3 of the first differential, the first differential first planetary bevel gear 22 and The first differential gear and the second planetary bevel gear 17 are jointly meshed with the first differential gear input bevel gear 4 on one side, and the first differential gear first output bevel gear 18 on the other side. The input bevel gear 4 of the first differential rotates coaxially with the first output bevel gear 18 of the first differential; the first output bevel gear 18 of the first differential is coaxially ...
Embodiment 2
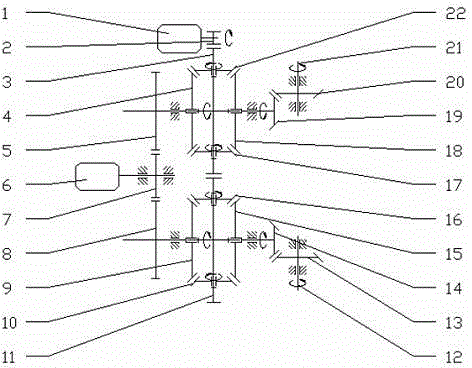
[0038] like Figure 7As shown, the basic structure and principle of this embodiment is the same as that of Embodiment 1, the difference is that the steering drive motor 6 is connected to the first differential carrier gear 3 and the second differential carrier gear respectively through the steering input gear 7 11 meshing; the front and rear drive motors 1 drive the first differential input gear 5 through the front and rear input gears 2, and the first differential input gear 5 meshes with the second differential input gear 8.
Embodiment 3
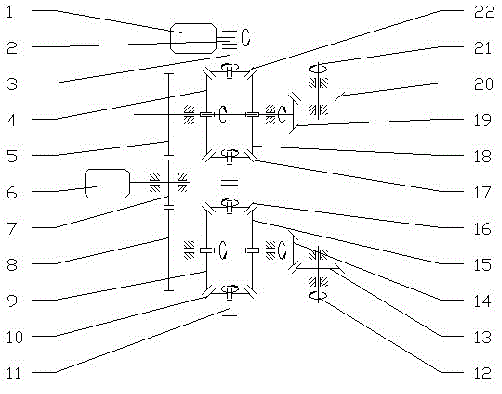
[0040] like Figure 8 As shown, the basic structure and principle of this embodiment is the same as that of Embodiment 1, the difference is that the front and rear drive motors 1 drive the second differential carrier gear 11 through the front and rear input gears 2, and the second differential carrier gear 11 Meshes with the first differential carrier gear 3; the steering drive motor 6 drives the second differential input gear 8 through the steering input gear 7, and the second differential input gear 8 drives the first differential through the transition gear 23 input gear 5.
[0041] In addition, if Figure 9 , 10 As shown, the first differential planetary bevel gear and the second differential planetary bevel gear can be expanded from two to three or four or more.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More