Positioning method based on machine vision
A positioning method and machine vision technology, applied in the direction of instruments, computer parts, image data processing, etc., can solve the problems of low efficiency, high cost, waste of human resources and other problems of manual transportation, and achieve improved labor productivity, low cost, and reduced The effect of human dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
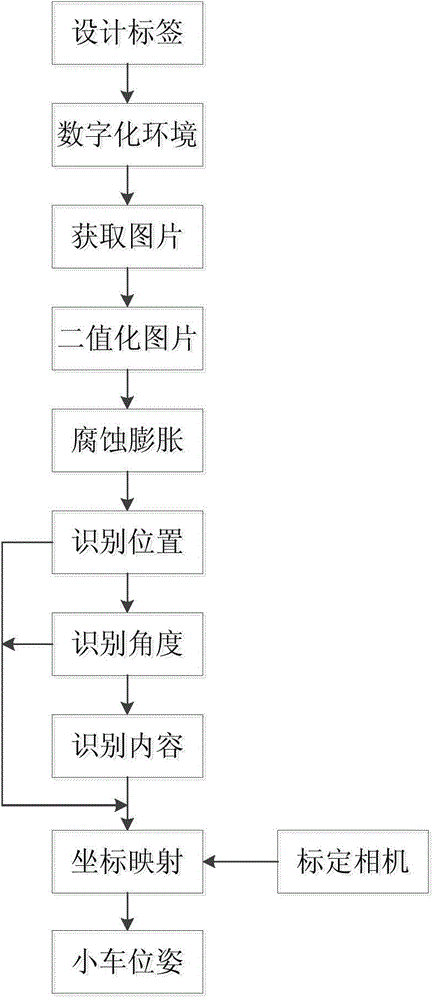
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
[0036] 1 Design positioning label
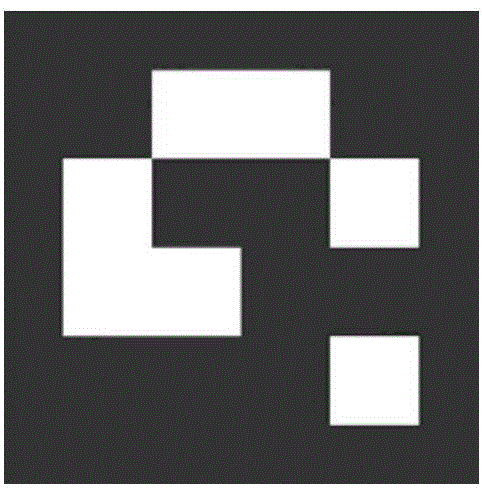
[0037] The positioning label designed by this method is as follows figure 2 As shown, it contains 16-bit binary information, which is divided into 3 parts: 10 data bits, 4 direction flag bits, and 2 check bits. Wherein, the data bit represents the position of the positioning tag in the environment, and the direction flag bit represents the direction of the positioning tag in the environment.
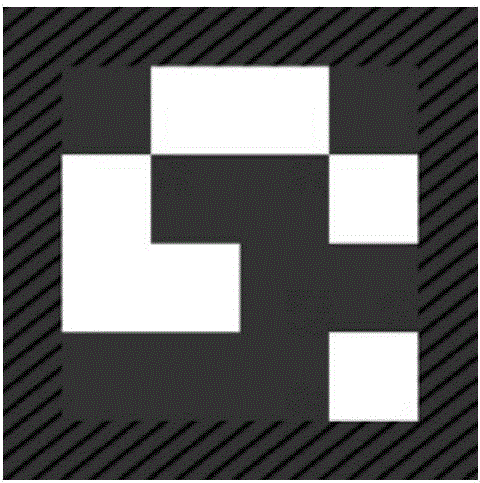
[0038] 1.1 Locate label size and shape
[0039] The positioning label designed by the present invention includes two colors of red and white, a square size of 18cm*18cm, and is divided into two areas: a frame area and a data area. Such as image 3 As shown, the outer slashed area is the border area, and the middle unslashed area is the data area. The border area is a red box with a width of 2.25cm. The data area is 16 red and white square...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com