

Small-sized underwater hydraulic manipulator paw joint structure
A joint structure and manipulator technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., to achieve the effects of avoiding pollution, small volume and weight, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in further detail below in conjunction with the accompanying drawings.
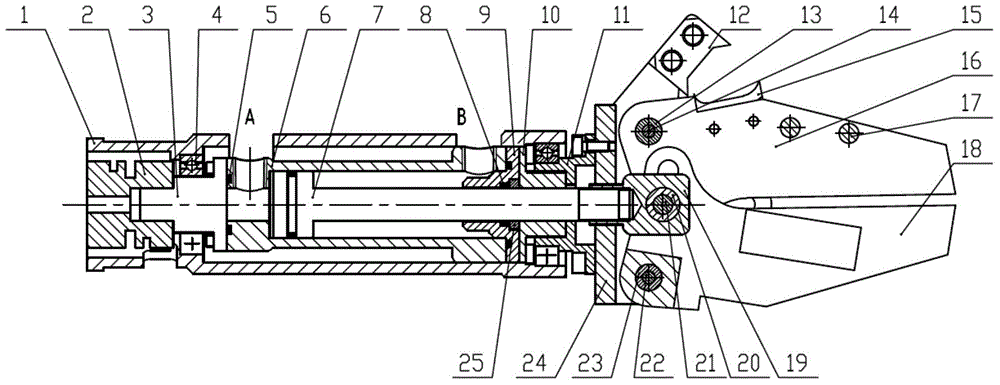
[0033] The claw joint structure of the small underwater hydraulic manipulator of the present invention is composed of three groups of shearing blades and shearing fingers installed with the shearing blades, a group of grabbing fingers, claw driving hydraulic cylinders, driving connecting parts and a fixed base; The claw drive hydraulic cylinder, the drive connecting part and the gripper adopt a chute lever type force transmission mechanism, and the gripper adopts a fulcrum rotary structure and is installed and fixed on the gripper base.
[0034] Three groups of cutting blades, cutting fingers and a group of grasping fingers form the whole fulcrum rotary gripper structure; ) is connected with the driving rod of the gripper hydraulic cylinder and transmits the driving force; the fixed base is connected with the hydraulic cylinder, and the gripper structure of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More