A vehicle detection and tracking method based on monocular vision
A vehicle detection, monocular vision technology, applied in the direction of instrument, calculation, character and pattern recognition, etc., can solve the problems of poor real-time performance and high anti-interference, so as to reduce the false detection rate, reduce the detection range, improve the real-time performance and The effect of anti-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Below in conjunction with accompanying drawing, the present invention will be further described:
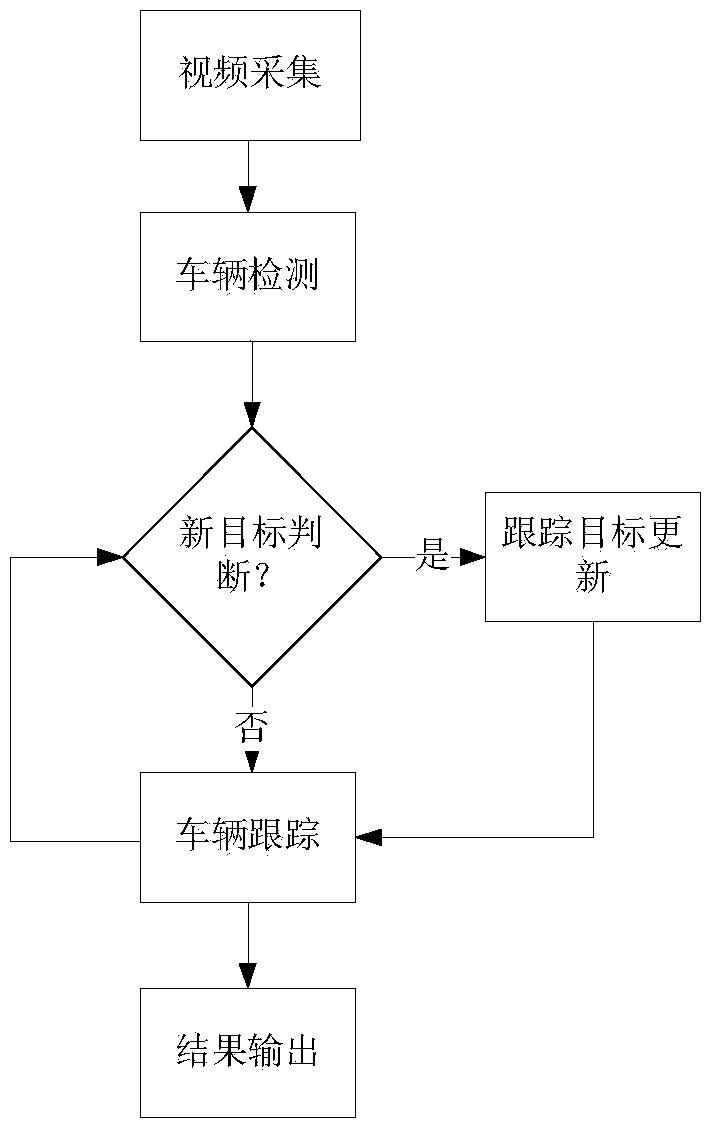
[0034] figure 1 The flow chart of vehicle detection and tracking in this implementation case, the specific process is as follows: first collect the original video image, use a vehicle detection method that combines multiple features of lane lines, edges, vehicle bottom shadows and textures for vehicle detection, and then detect If it is a new target, it will add a tracking target; if it is not a new target, it will continue to track the original target and output the result.
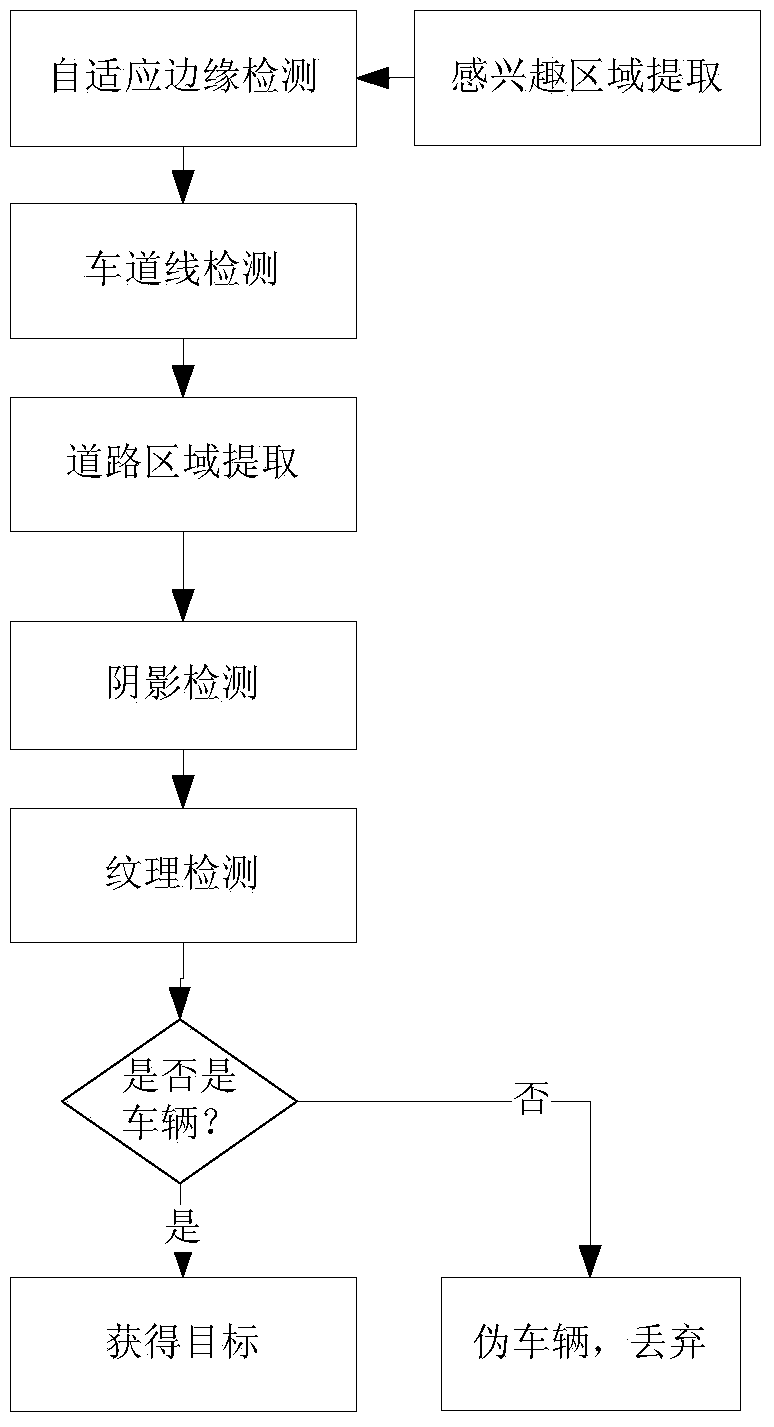
[0035] Such as figure 2 As mentioned above, the steps of vehicle detection are divided into:
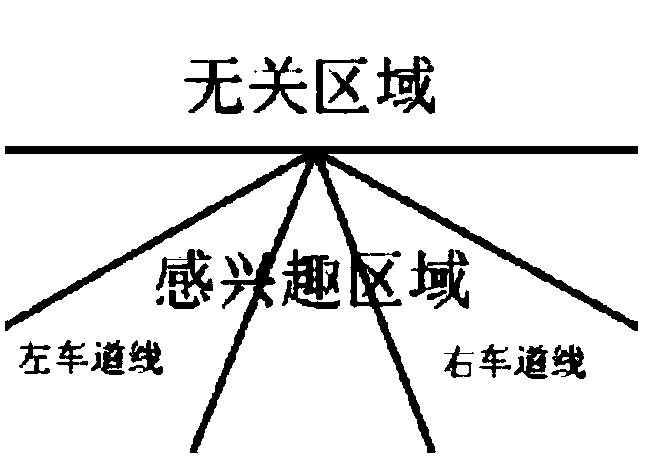
[0036] Step 1: Remove some areas of the image that do not contain road information, select the lower 3 / 5 area as the area of interest of the lane line, and initially extract the area of interest;
[0037] Step 2: In order to ensure the accuracy of the detection results under different lighting condi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com