

Control-limited minisatellite three-axis magnetic moment attitude control method based on algebraic Lyapunov equation
An attitude control, three-axis magnetic technology, applied in attitude control and other directions, can solve problems such as not getting due attention, and achieve the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0019] Specific embodiment one: the three-axis magnetic moment attitude control method of the limited small satellite based on the algebraic Lyapunov equation of the present embodiment, it is realized according to the following steps:
[0020] Step 1: Establish the attitude kinematics and attitude dynamics models for the three-axis magnetic moment attitude control of the control-constrained small satellite, and obtain the state space equation;
[0021] Step 2: Solve the explicit solution P of the algebraic Lyapunov equation 0 :
[0022] A T P 0 +P 0 A=-D T D.
[0023] where A is the system matrix, D is a matrix of any dimension, since the system matrix A is critically stable or Lyapunov stable, it is guaranteed that the above algebraic Lyapunov equation has a positive definite solution P 0 ;
[0024] Step 3: Through the positive definite solution P of the algebraic Lyapunov equation 0 , to design an explicit linear feedback control law in the control-constrained situat...
specific Embodiment approach 2
[0025] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is that step one is specifically:
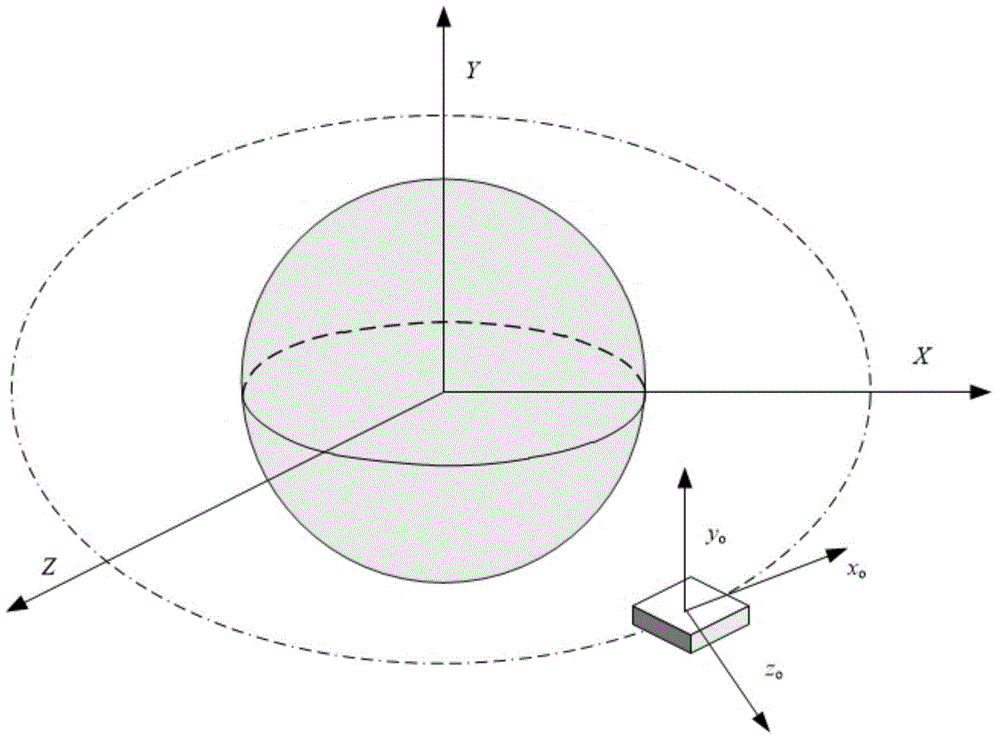
[0026] (1) Coordinate system definition
[0027] Introduce the geocentric equatorial inertial coordinate system X-Y-Z denoted as F i , where the X-axis points to the vernal equinox, the X-Y plane is the equatorial plane of the earth, and the Z-axis points to the North Pole along the earth's axis;
[0028] f b Denoted as the satellite body coordinate system, F o is the orbital coordinate system, its coordinate origin is located at the center of mass of the satellite, x o Along the track direction, y o perpendicular to the orbital plane, z o is the direction of the lowest point;
[0029] In the orbital coordinate system F o The attitude of the satellite is described below. If the attitude of the satellite reaches the desired position, the coordinates of the satellite body x b -y b -z b and the orbital coordina...
specific Embodiment approach 3
[0067] Specific embodiment three: what this embodiment is different from specific embodiment one or two is: in the step 2, solve algebraic Lyapunov equation positive definite solution P 0 The specific process:
[0068] Algebraic Lyapunov Equation
[0069] A T P 0 +P 0 A=-D T D (14)
[0070] make where e j Represents the 6th-order identity matrix I 6 The jth column of , then calculate
[0071] HAH - 1 = ω 0 A 2 0 0 0 0 A 1 0 A 3 ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Tilt angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More