

A Linear Feedback Global Stabilization Method for Control Constrained Spacecraft Rendezvous Control System
A control system and linear feedback technology, applied in the direction of instrumentation, geometric CAD, calculation, etc., can solve the problems of complex control law implementation, difficulty in debugging, and no relevant report of linear control law, so as to achieve convenient design and implementation, and fast convergence speed , the effect of strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0025] Specific implementation mode one: a linear feedback global stabilization method for a control-constrained spacecraft rendezvous control system includes the following steps:
[0026] Step 1: Introduce the target spacecraft orbital coordinate system o-xyz, its origin o is located at the center of mass of the target spacecraft, the x-axis is along the direction of the radius of the circular orbit, the y-axis is along the flight direction of the tracking spacecraft, and the z-axis points to the orbital plane The outer and x-axis and y-axis form a right-handed coordinate system; based on the linearization model of the spacecraft rendezvous system in the x-y plane described by the C-W equation, when the thrusters in the x and y-axis directions are both working, a linear system for global stabilization is established. Feedback control law:
[0027] u=FX(1)
[0028]
[0029] in is the state vector, where x and are the position and velocity in the x-axis direction, y and...
specific Embodiment approach 2
[0037] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the specific process of establishing a linear feedback control law to realize global stabilization in the step one is:
[0038] Step 11: Establishment of the system model;
[0039] The linear C-W equation is used as the mathematical model of the spacecraft rendezvous control system, and its specific form is:
[0040]
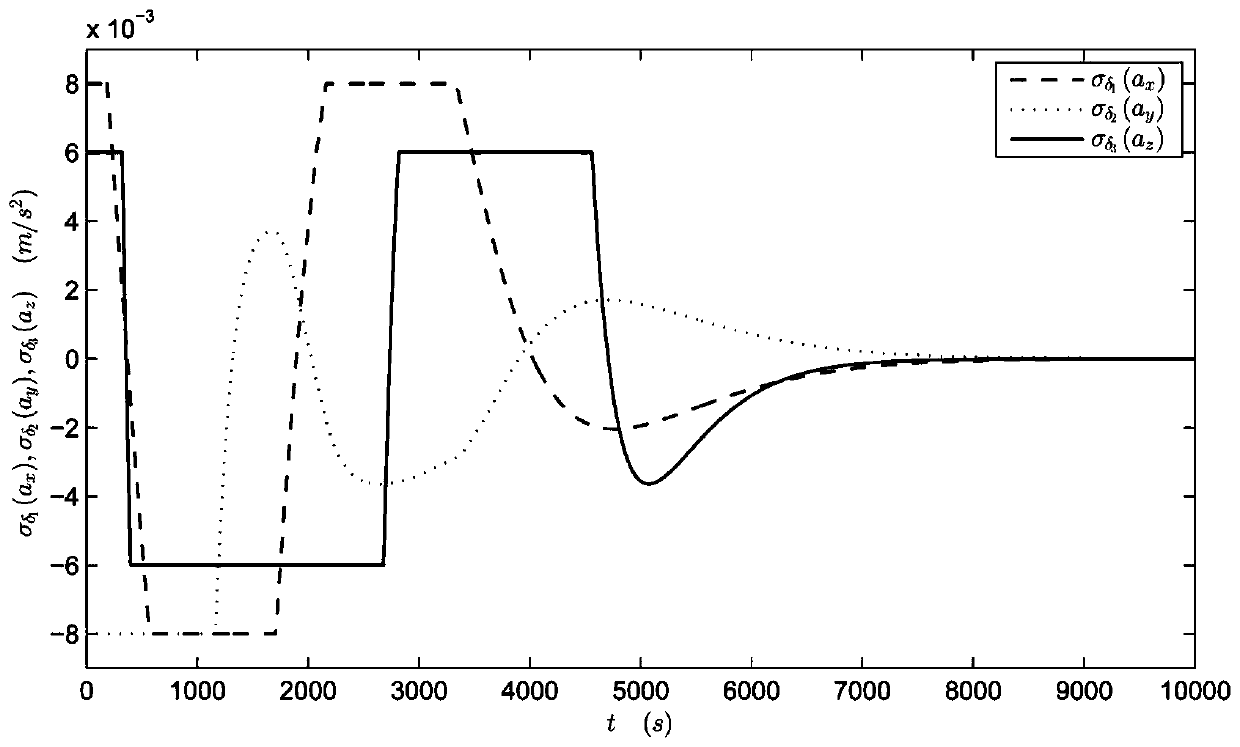
[0041] where a x ,a y ,a z are the accelerations on the x, y, and z coordinate axes of the thrusters installed on the catching-up spacecraft, respectively, is a saturation function;
[0042] σ δ (·): R→[-δ,δ] is a standard saturation function, the specific form is
[0043]
[0044] In order to simplify the description, let σ(x) represent σ 1 (x).
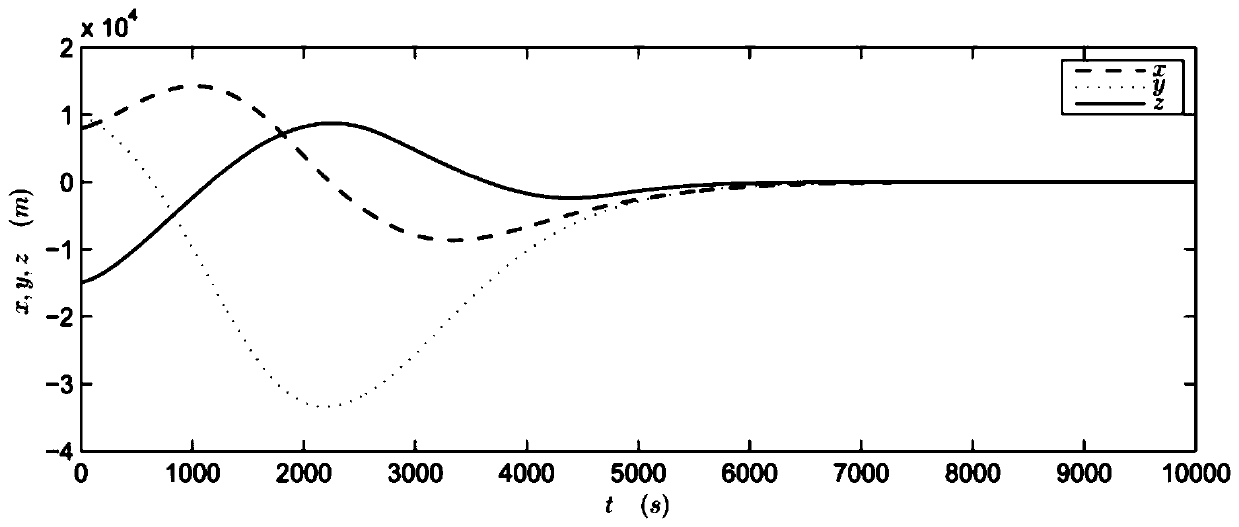
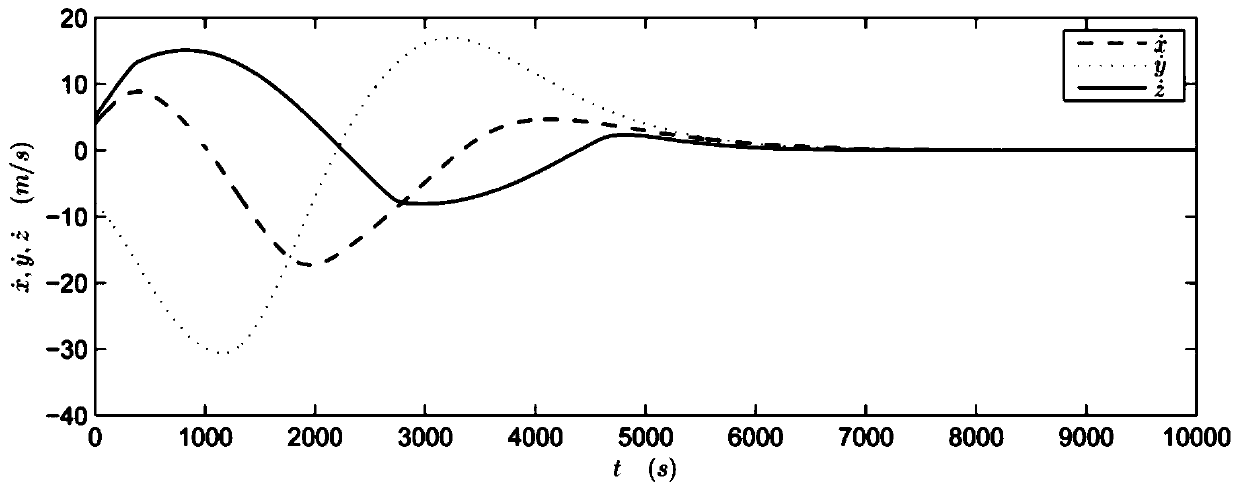
[0045] The spacecraft rendezvous process is described as a state vector From a non-zero initial value φ(t 0 ) transition to state φ(t f )=0 process, t 0 Indicates the start time of the rendezvous ...
specific Embodiment approach 3
[0097] Specific embodiment three: the difference between this embodiment and one of the specific embodiments one to two is: the specific process of establishing the conditions to ensure that the closed-loop system has the fastest convergence rate in the step two is:
[0098] Since the closed-loop systems (1) and (6) (or (12)) are globally asymptotically stable, the system will work in the linear region after a finite time and become a linear system. At this time, the convergence speed of the system depends on the position of the pole set λ(A+BF) of the system:
[0099] λ(A+BF)=λ(nA 0 +nB 0 f 0 ) = nλ(A 0 +B 0 f 0 ) (26)
[0100] where λ(A 0 +B 0 f 0 ) has nothing to do with the angular velocity n, so that the closed-loop system has the fastest convergence speed, and the feedback gain F 0 is the optimal solution to the following extremum problem:
[0101]
[0102] λ(A 0 +B 0 f 0 ) is related to μ; even when μ is given, the above extremum problem is a nonlinear ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More