

Ship track tracking prediction control method inhibiting parametric rolling actively
A track tracking and active suppression technology, applied in the field of ship track tracking control, can solve the problems of the track tracking control process and the inaccurate description of the parameter roll resonance process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
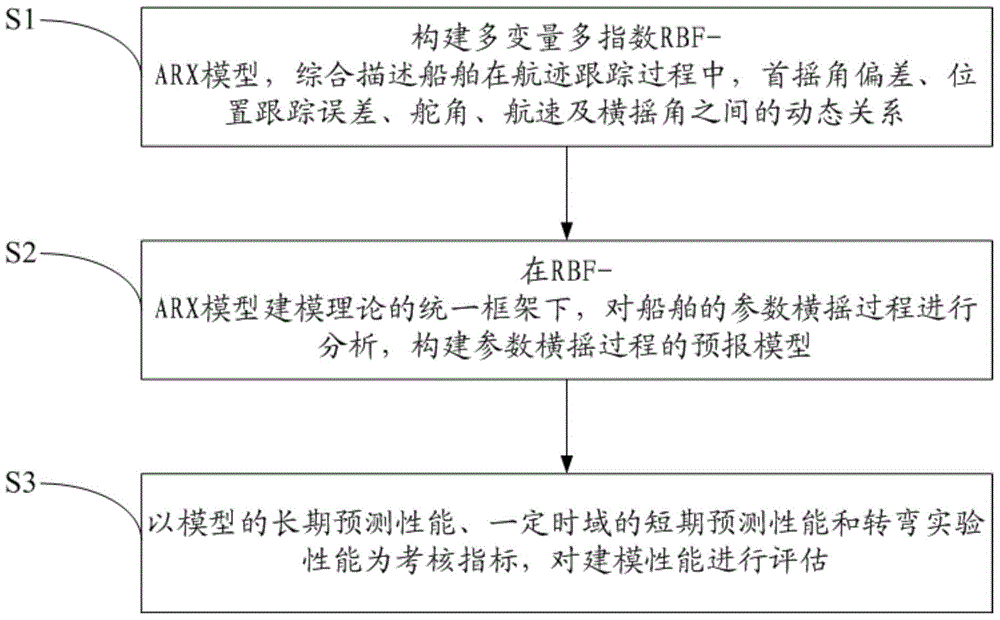
[0017] A ship track tracking predictive control method that actively suppresses parametric roll, such as figure 1 shown, including the following steps:
[0018] S1. Build a multi-variable and multi-exponential RBF-ARX model to comprehensively describe the dynamic relationship between the ship's track tracking process, yaw angle deviation, position tracking error, rudder angle, speed and roll angle.
[0019] In step S1, taking the experimental ship "Shiji Maru" of Tokyo Ocean University as the research object, a multi-variable and multi-exponential RBF-ARX model is constructed to comprehensively de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More