

Robot bionic finger
A robot and finger technology, applied in the field of robots, can solve the problem of low control difficulty and achieve the effect of increasing friction, simple structure and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
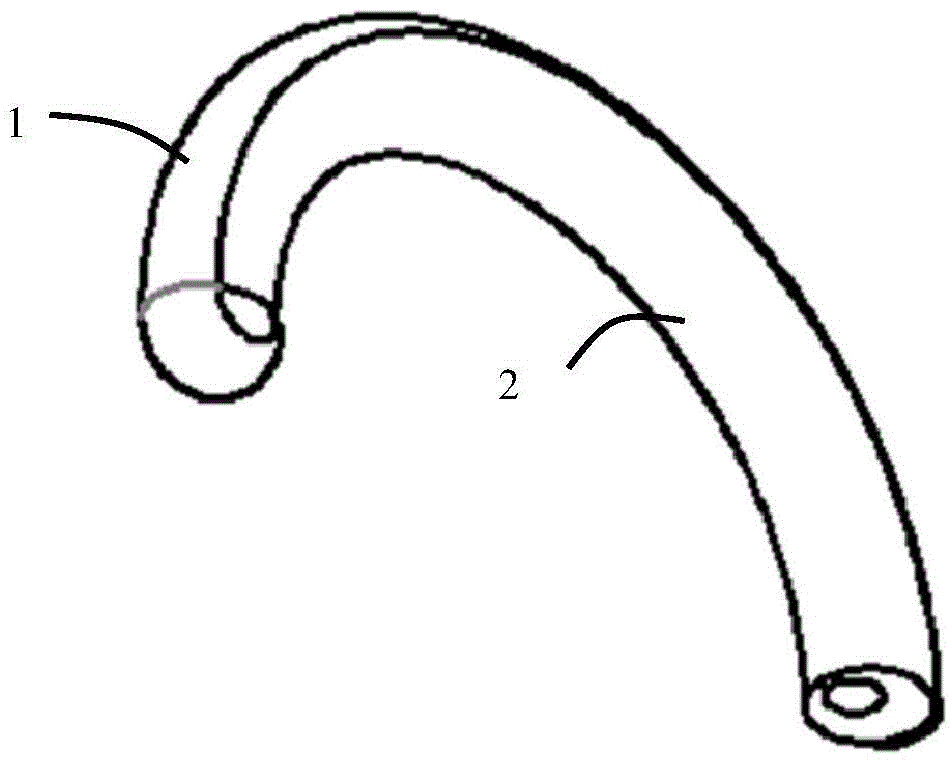
[0017] Such as figure 1 As shown, the robotic bionic finger of the present invention includes a cage 1 and an airbag 2 . The airbag 2 is a long cylindrical structure, the cage 1 is a long sheet structure, made of elastic material, and is curved in a natural state, and the cage 1 is axially attached to the airbag of the airbag 2 wall, so that the airbag 2 is curved in a natural state.
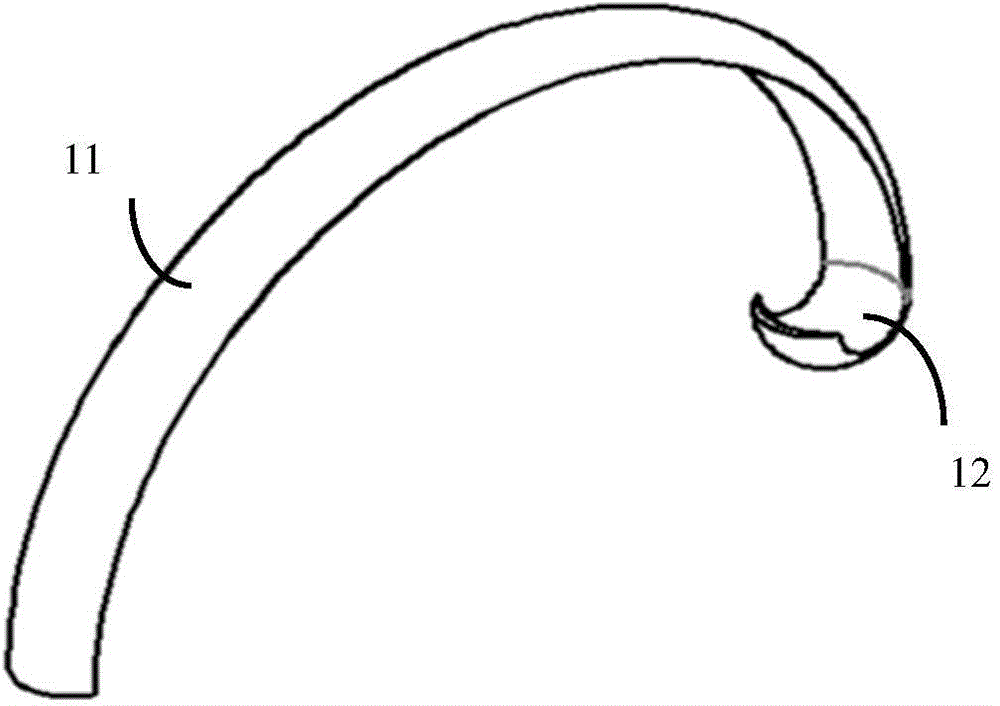
[0018] Such as figure 2 As shown, the retainer 1 includes an integrally formed base body 11 and a top cover 12 , the top cover 12 is attached to the end of the airbag 2 , and the elastic deformation of the base body 11 is greater than that of the top cover 12 . The base body 11 is stamped from an elastic metal sheet, which can be easily deformed and can be straightened; the top cover 12 is made of a metal material with good rigidity, which will not ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More