

Segmentation filtering iterative learning control method of motor servo system
A technology of iterative learning control and servo system, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as bad learning transient, and achieve the effect of avoiding bad learning transient and improving tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
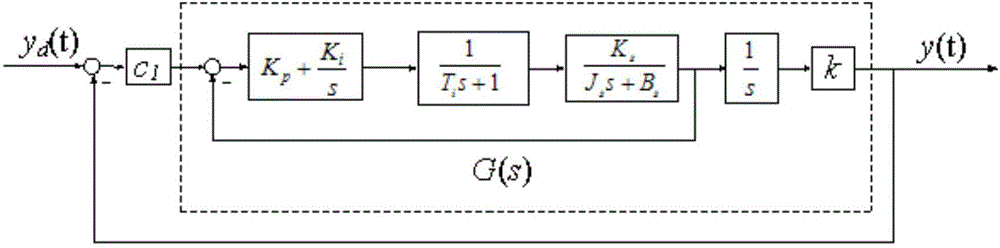
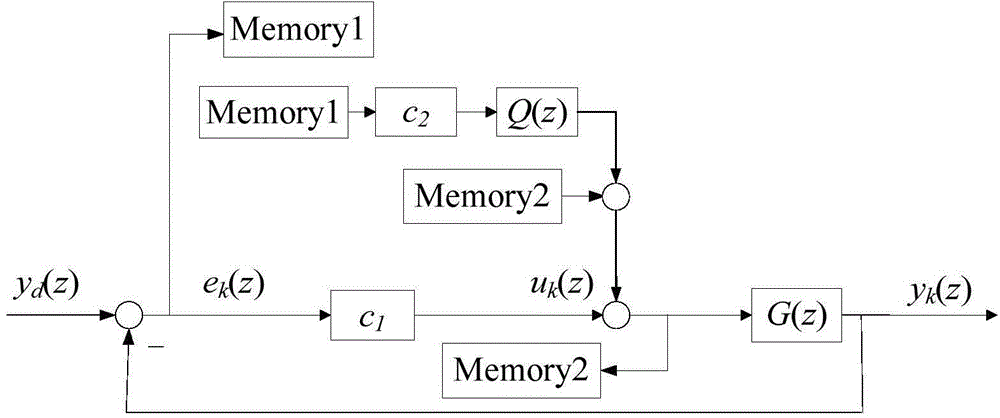
[0034] consider as figure 2 In the ILC simulation system shown, the motor servo control system G(z) is as figure 1 shown. Take the learning gain c 1 、c 2 600 and 50 respectively, the zero-phase filter Q(z) uses a second-order Butterworth low-pass filter. Motor torque constant K s =0.687N·m / V, the moment of inertia J of the motor s =6.234×10 -5 kg·m 2 , the viscosity coefficient B of the motor s =2.127×10 -3 kg·m 2 / s, motor transmission ratio k=0.4, other parameters K p =1.089×10 -1 V s / mm, K i= 3.716V / mm, T i = 0.0001s. according to figure 2 The rules for obtaining the ILC are as follows:
[0035] u k (z)=c 1 e k (z)+c 2 Q(z)e k-1 (z)+u k-1 (z)
[0036] the y k (z)=G(z)u k (z)
[0037] G ( z ) = 3.701 × ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More