

Mobile terminal oriented wearable finger cot type force tactile interaction device and implementation method
A mobile terminal and interactive device technology, applied in the field of force-tactile interaction, can solve the problems of increased system volume, bloated volume, and large amount of calculation, and achieve the effect of simple control principle and good portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
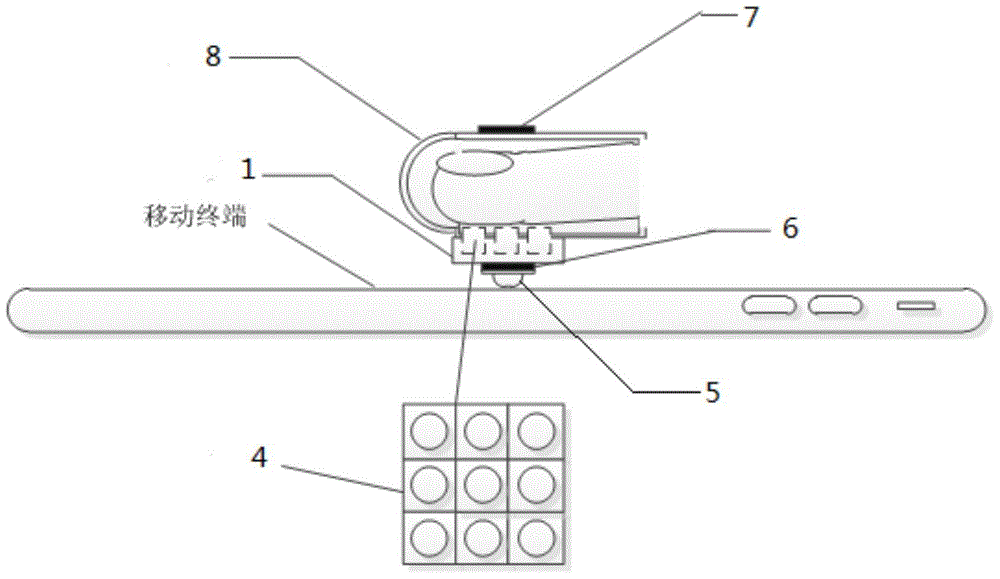
[0020] Such as figure 1 As shown, a wearable finger cot-type force-tactile interaction device for mobile terminals includes an installation and fastening module, a tactile stimulation execution module 4, a signal measurement and conditioning module and a core control interface module. The installation and fastening module is a wearable The main mechanism device is provided with a tactile stimulation execution module 4 and a signal measurement and conditioning module, the signal output of the signal measurement and conditioning module is connected to the signal input of the core control interface module, and the core control interface module is wirelessly connected to the mobile terminal The connection is to map the tactile expression information to the tactile stimulation execution module 4 through the mobile terminal, and the signal output end of the core control inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More