

Multifunctional mechanical-arm and wheel cooperated traction mobile robot
A mobile robot and multi-functional machinery technology, applied in the field of mobile robots, can solve problems such as poor ability to pass through raised obstacles, complex robot structure design, and large body posture changes, so as to reduce the problem of weight gain and simplify the design of mechanical structures , The effect that the speed of the car body changes uniformly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention is described in more detail below in conjunction with accompanying drawing example:
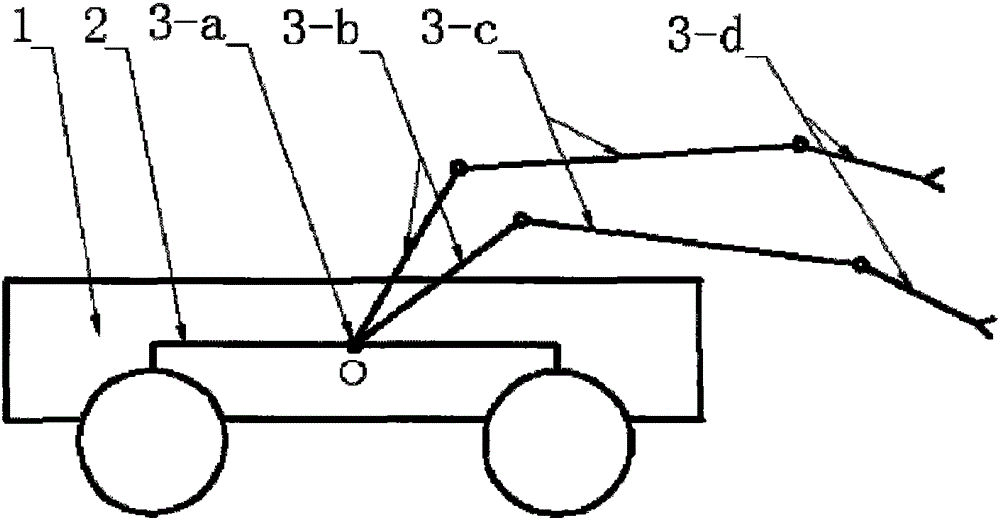
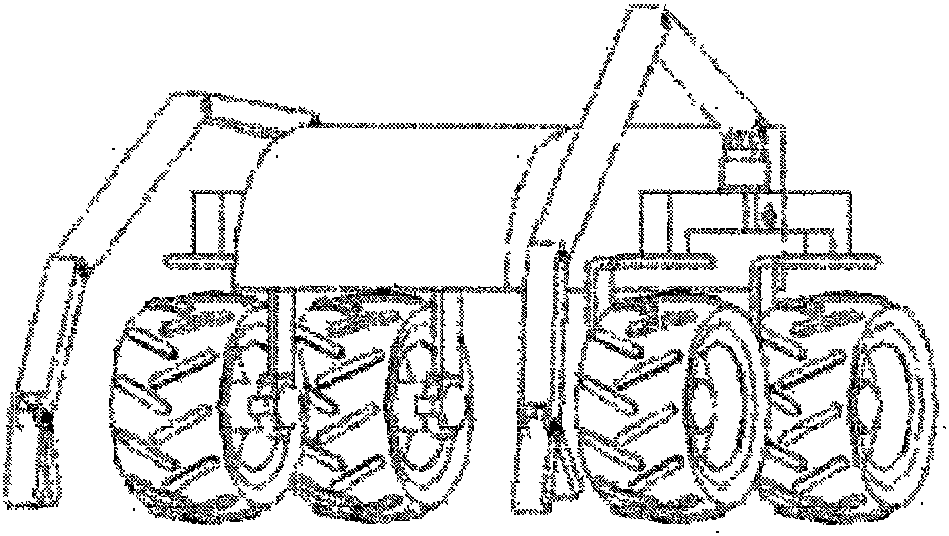
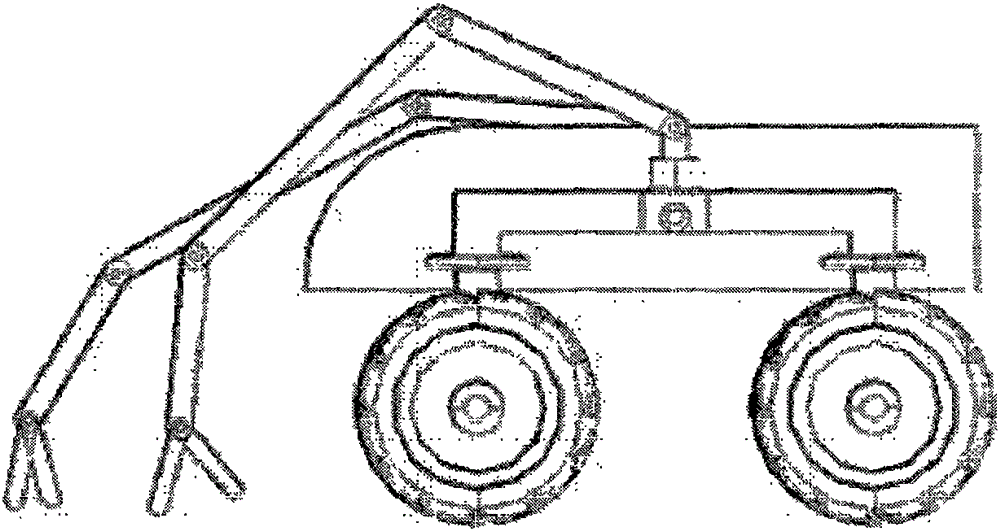
[0013] combine figure 1 ~3. In the present invention, the mechanical arm 3 has joints with three degrees of freedom, and the three drive motors are respectively installed at the rotation axes of each joint. The end of the forearm 3-d is fixedly connected to the mechanical claw, and the mechanical claw is driven by the steering gear to realize the opening and closing action. The base 3-a is fixedly connected to the center 0 of the rocker arm 2 . The mechanical arm 3 is equipped with three torque sensors, which are respectively cascaded with the above three drive motors, connected with the motor reducer and the actuator, as a transmission device and a detection device; at the same time, a pressure sensor is installed at the front end of the manipulator claw to detect the contact between the manipulator claw and the ground. force between them.
[0014] When the rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More