

Numerical control system velocity planning method based on fractional calculus
A technology of fractional calculus and speed planning, which is applied in general control systems, control/regulation systems, digital control, etc., can solve problems such as sudden acceleration changes, complex programming, and severe vibration of machine tools, and achieve smooth results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0024] Specific implementation mode one: a kind of speed planning method of numerical control system based on fractional calculus in this implementation mode is specifically prepared according to the following steps:
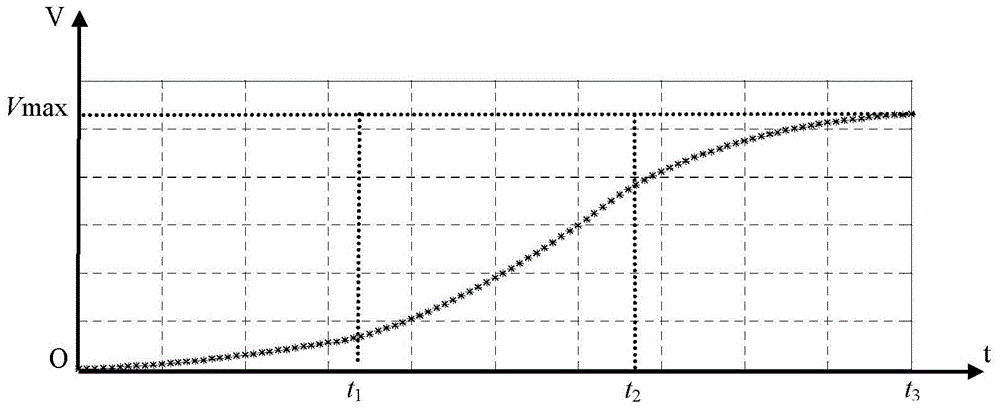
[0025] A numerical control system speed planning method based on fractional calculus uses the memory characteristics of fractional calculus to perform a fractional order integration on the predefined nominal acceleration to obtain a smooth acceleration and deceleration speed planning curve
[0026] Step 1, according to the controlled object motion time t, utilize the continuous function y=f(t) to derive the fractional derivative:
[0027] D t α c f ( t ) = lim h → 0 1 h α ...
specific Embodiment approach 2
[0040] Specific embodiment two: the difference between this embodiment and specific embodiment one is: in step one, according to the controlled object motion time t, utilize continuous function y=f (t), deduce the concrete process of fractional order derivative as:
[0041] (1) For the continuous function y=f(t), according to the classic derivation formula, the first-order derivation formula of the function y=f(t) is:
[0042] f ′ ( t ) = d f d t = lim h → 0 f ( t ) - f ( t - h ) ...
specific Embodiment approach 3
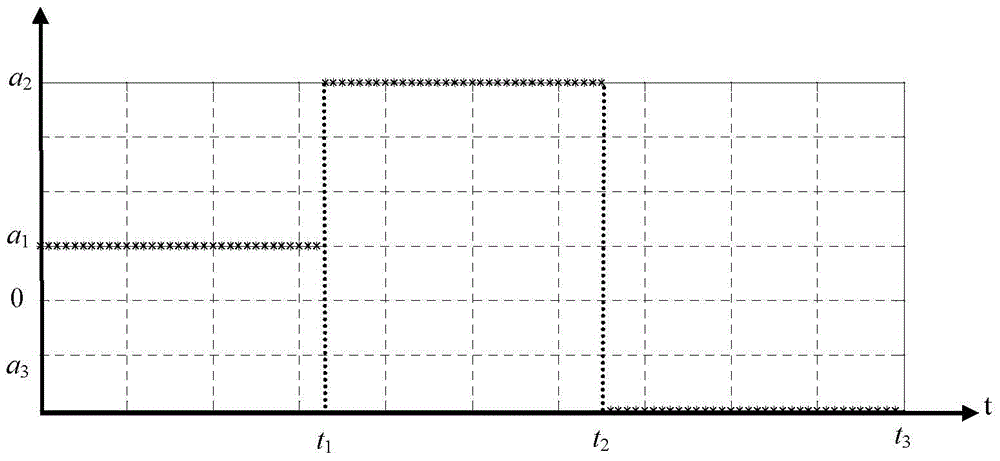
[0055] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: in step three, let α<0, the mathematical expression of the nominal acceleration defined in step two is:
[0056] a ( t ) = a 1 0 ≤ t t 1 a 2 t 1 ≤ t t 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More