

Underwater operation robot and working method thereof
A technology for underwater operations and robots, which can be applied to underwater operation equipment, manipulators, manufacturing tools, etc., and can solve the problems of less civil use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
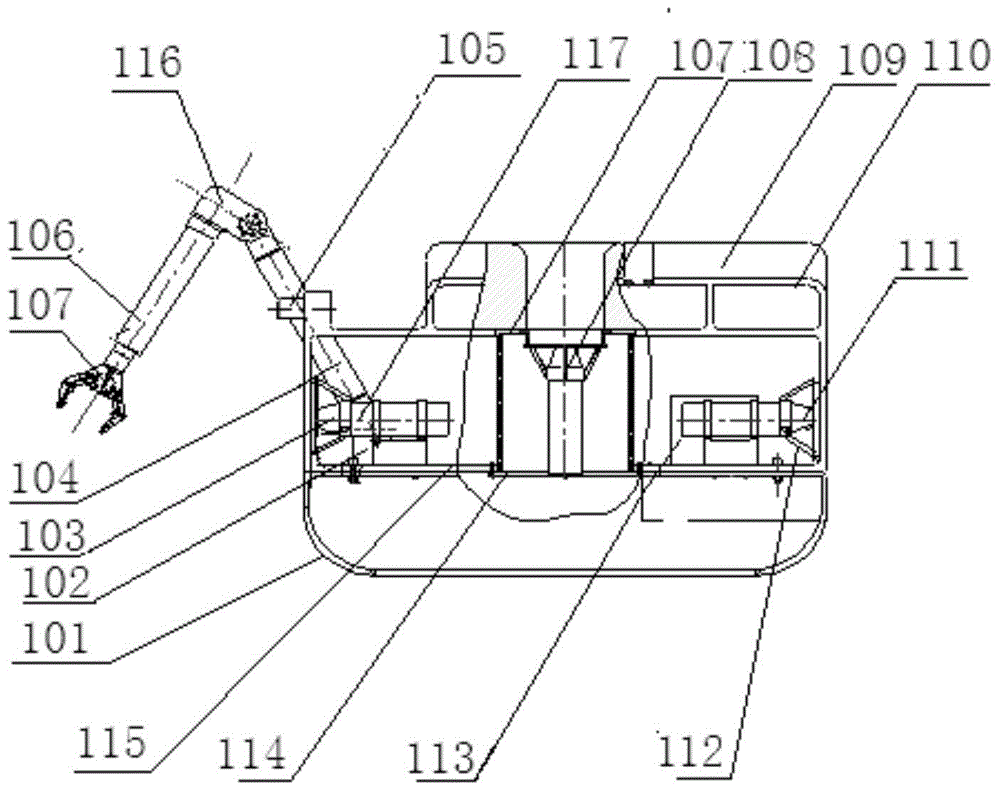
[0035] Such as figure 1 As shown, an underwater operation robot is composed of a robot body, a propeller, an air bag, a balance device, and an operation manipulator;
[0036] The robot fuselage is welded by angle steel. The fuselage is generally divided into three layers. The bottom layer is a foot support frame 101 that allows the fishing robot to stand on the bottom of the water. Bracket 115, the top layer is the sub-bracket 110 for installing airbag 109;
[0037] The airbag 109 is used to balance the gravity of the robot and reduce the working load of the propeller; the middle part of the airbag 109 is provided with a groove, and is fixed on the fuselage sub-support 110 with a strip metal buckle through the groove; the airbag is made of chemical material Injection molded;
[0038]Described pusher is made up of two front propellers 103 facing forward, two rear propellers 111 facing backward and a vertical propeller 108 in a vertical direction, and the five propellers are r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More