

Microminiature robot capable of walking up and down stairs automatically
A robot and miniature technology, applied in the field of investigation and search and rescue, can solve the problems of complex movements and low efficiency, and achieve the effect of ensuring the reliability of movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below with reference to the accompanying drawings and examples.
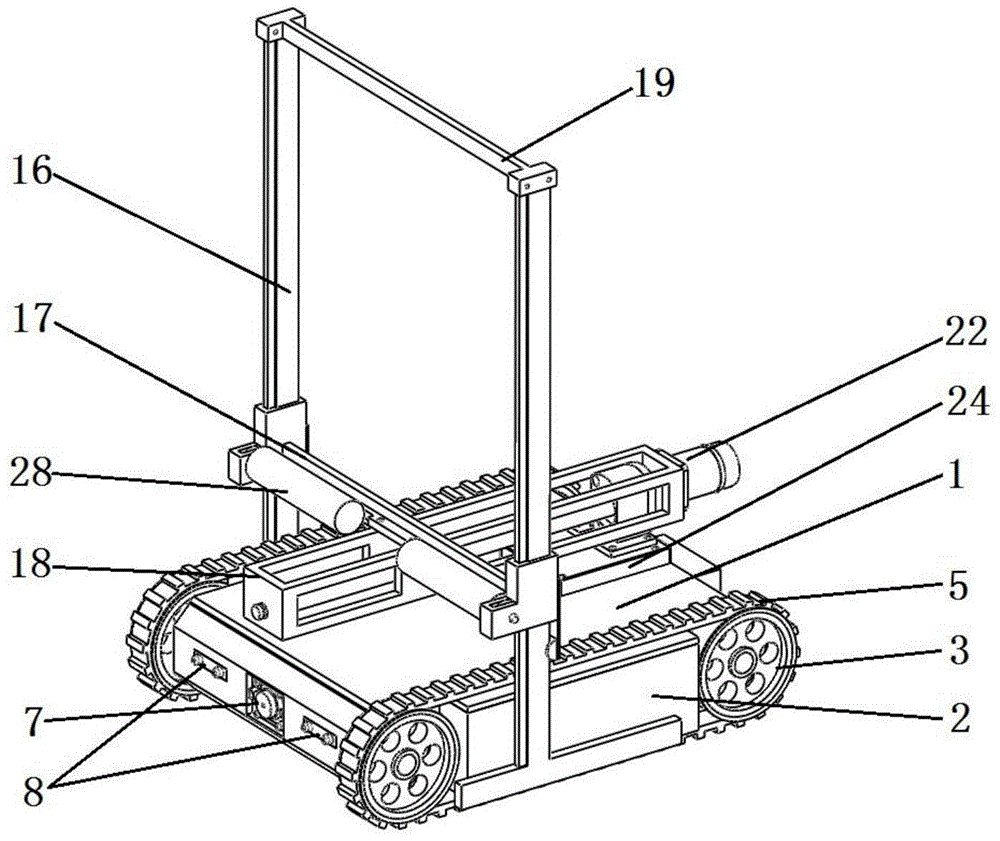
[0038] The present invention provides a kind of miniature autonomous up and down stairs robot, see attached figure 1 , including: crawler-type mobile chassis, stair-climbing bracket assembly and control assembly;
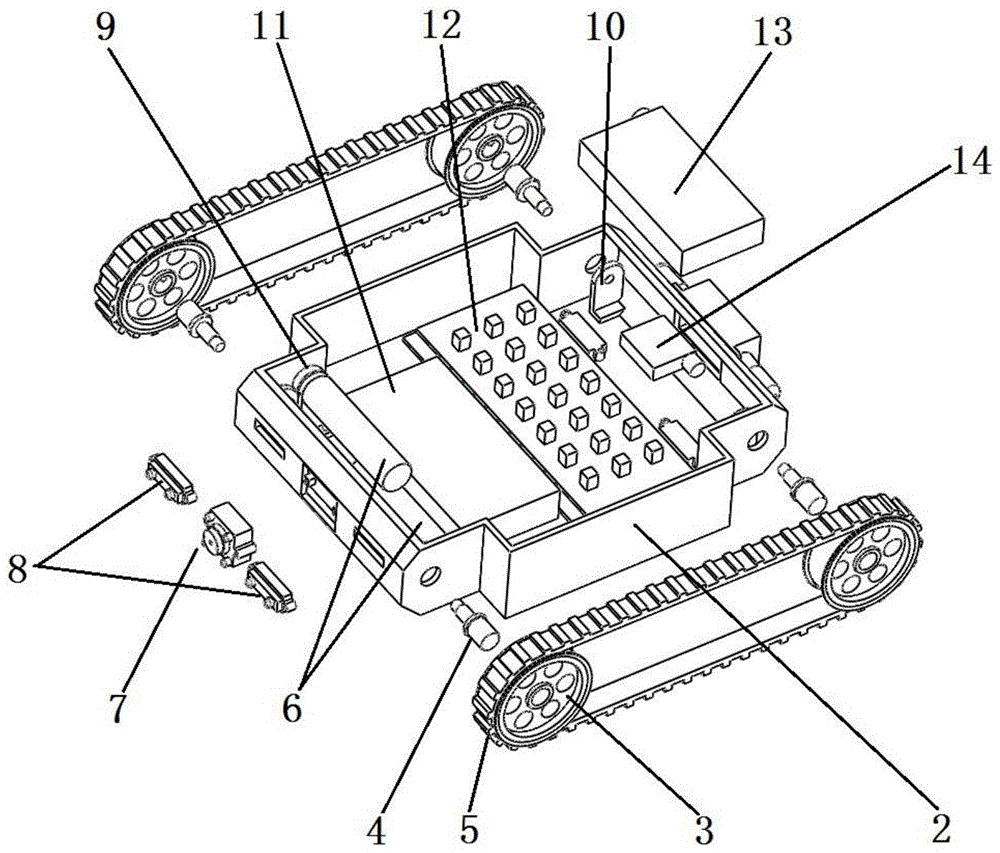
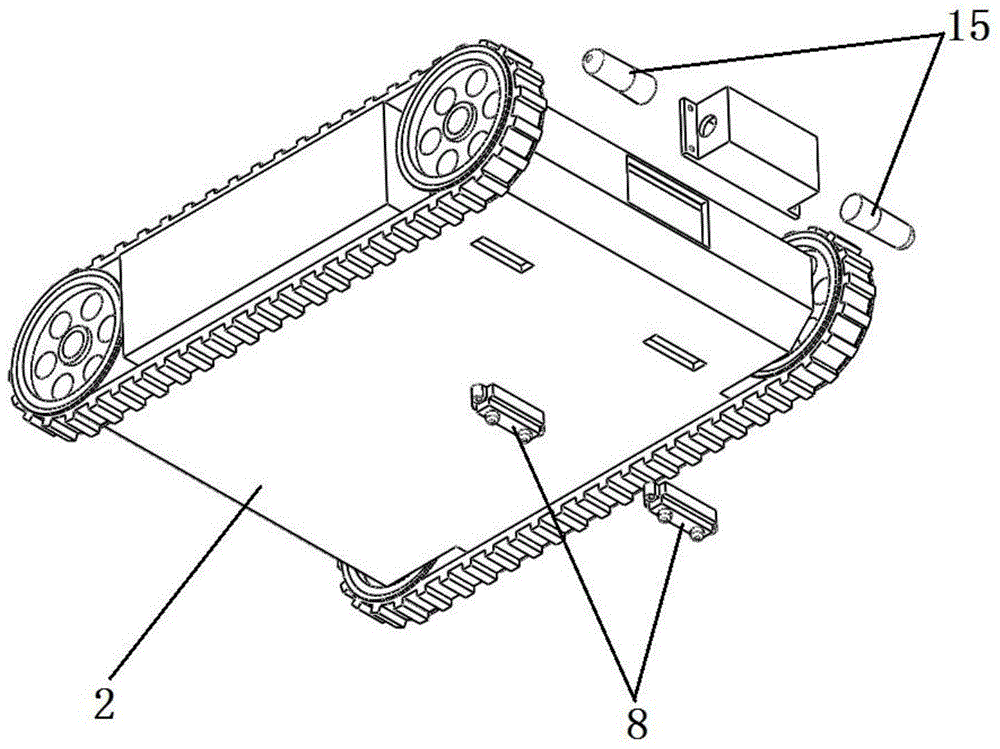
[0039] See attached figure 2 , 3 , the crawler-type mobile chassis includes: an upper cover plate 1, a lower casing 2, a crawler wheel 3, an axle 4, a crawler belt 5, a traveling motor 6, a traveling gear 9 and a base 10;
[0040] The lower casing 2 is a cylindrical casing with one end open;
[0041] The end of the axle 4 is fixed with a gear;
[0042] The four crawler wheels 3 are symmetrically installed on both sides of the lower casing 2 through the wheel shaft 4; the two crawler belts 5 are respectively installed on the two crawler wheels 3 on the same side; the two driving motors 6 are respectively fixed on the lower casing 2 through t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More