

Stiffness-adjustable flexible joint actuator mechanism
A flexible joint and driver technology, applied in the field of robotics, can solve the problems of difficult to achieve linear control, inability to achieve stiffness characteristics, complex overall structure, etc., and achieve the effect of compact structure, low friction resistance, and linearly controllable changes in joint stiffness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
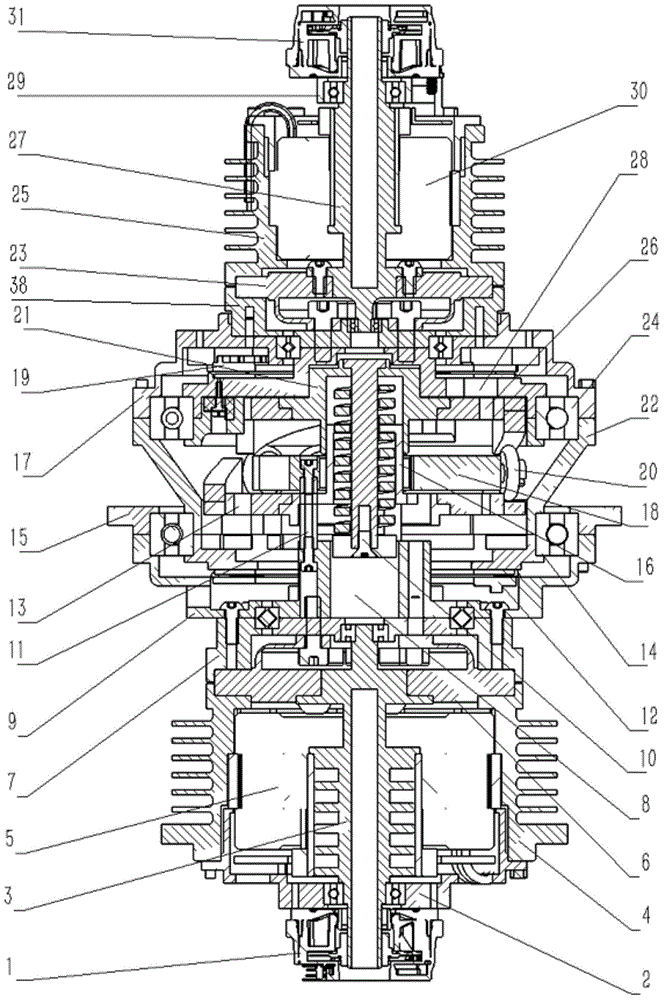
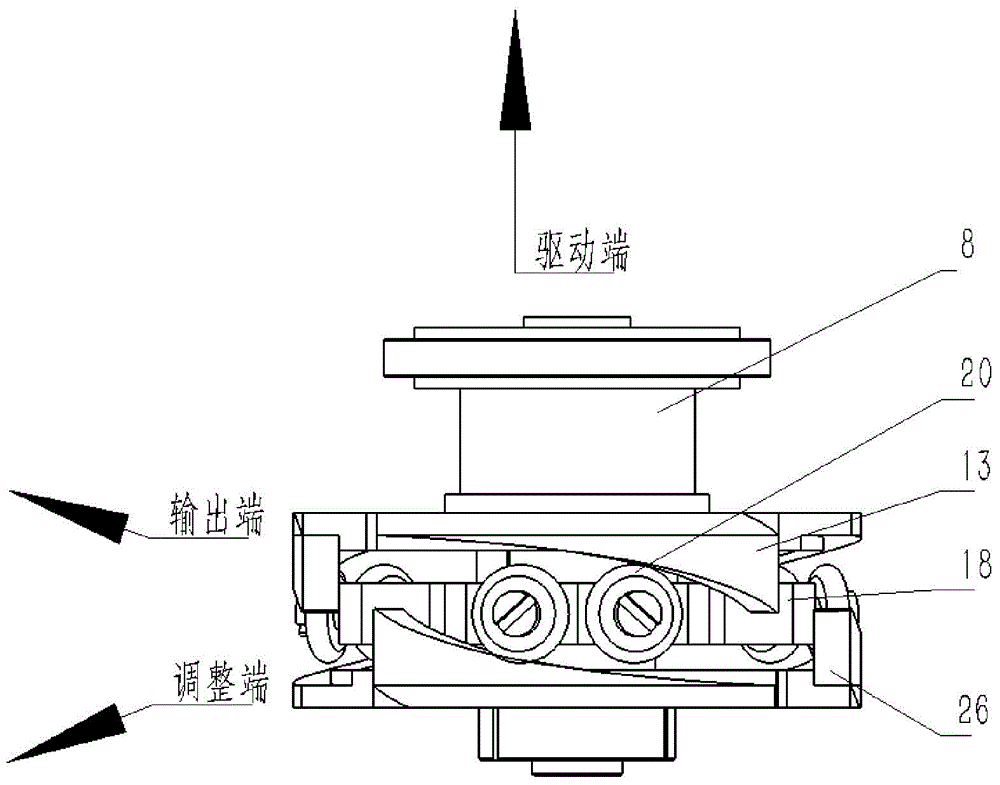
[0034] Such as Figure 1-Figure 2 As shown, a flexible joint driver mechanism with adjustable stiffness in the present invention includes: a drive end encoder 1, a drive end encoder flange 2, a drive end motor shaft 3, a drive end motor flange 4, a drive end motor 5, Drive end harmonic 6, drive end harmonic flange 7, drive end harmonic output shaft 8, front encoder seat 9, spring shaft 10, fastening pin 11, front encoder 12, front cam plate 13, front bearing 14 , base flange 15, front cam plate flange 16, rear encoder seat 17, middle turntable 18, rear encoder 19, runner 20, rear cam plate flange 21, flexible joint shell 22, adjustment end harmonics 23, Rear bearing 24, adjusting end motor flange 25, rear cam plate 26, adjusting end motor shaft 27, adjusting end harmonic output flange 28, adjusting end encoder flange 29, adjusting end motor 30, adjusti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More