

Visual mechanical arm control device and method based on Camshift visual tracking and D-H modeling algorithms
A visual tracking and control method technology, applied in the field of robotic arms, can solve problems such as inability to accurately control visual robotic arms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] Combine below Attached picture Embodiments of the present invention will be described in detail with Examples.
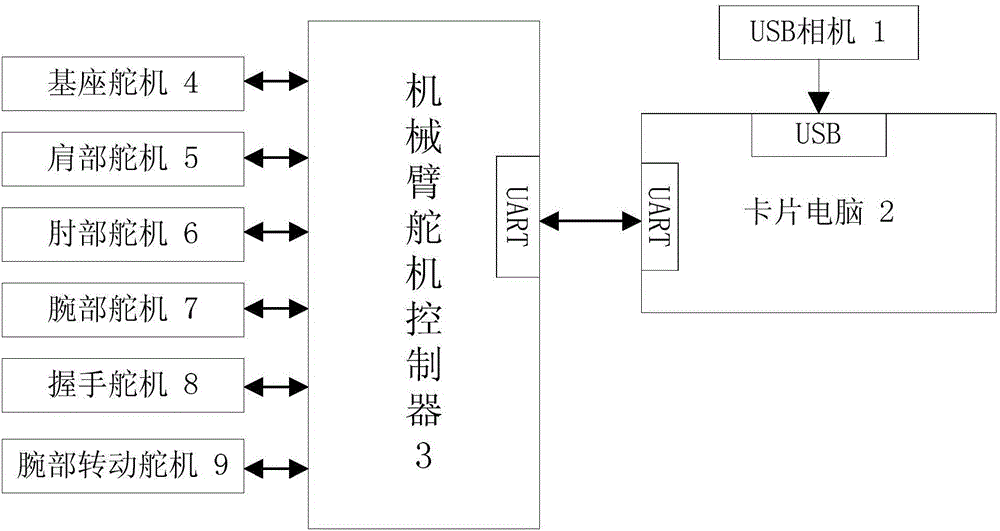
[0064] Such as figure 1 As shown, the present invention is based on the Camshift vision tracking and D-H modeling algorithm vision manipulator control device, including USB camera 1, card computer 2 and manipulator steering gear controller 3 and so on. Among them, the mechanical arm is a six-degree-of-freedom mechanical arm, which consists of a base servo 4, a shoulder servo 5, an elbow servo 6, a wrist servo 7, a handshake servo 8 and a wrist rotation servo 9.
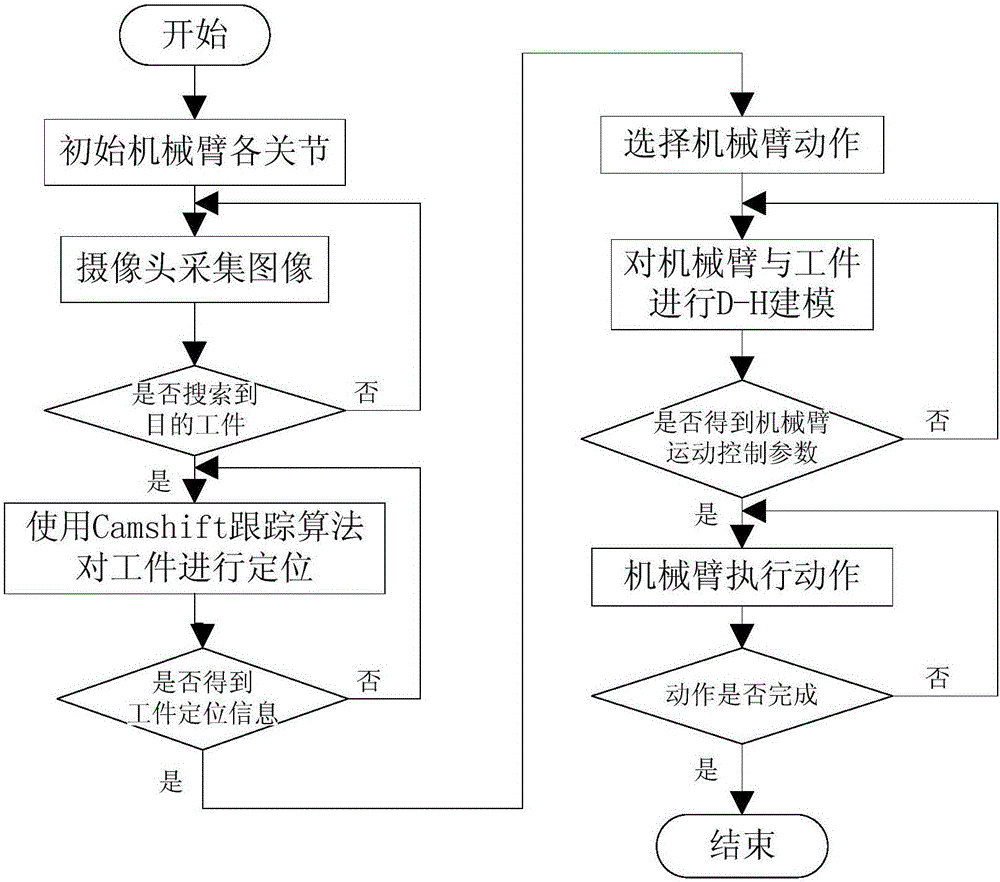
[0065] detailed description Such as figure 2 shown, including the following steps:
[0066] (1) Place various parts to be processed on the workbench plane;
[0067] (2) The USB camera 1 located at the wrist of the robotic arm automatically scans various parts on the workbench, and obtains the positioning information (X, Y, Z coordinates, camera coordinate system {C}) of each part through t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More