

Finite time robust cooperative tracking control method for multi-robot system
A multi-robot tracking control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as poor robustness and heavy communication burden of multi-robot systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0046] A limited-time robust cooperative tracking control method for a multi-robot system, comprising the following steps:
[0047] Step 1. Establish a multi-robot system with 1 leader robot and n follower robots. The leader robot is marked as 0, and the follower robot is marked as v L ={1,2,…n}; Neglecting external interference, following robot i∈v L The kinetic model of can be described by the following Euler-Lagrange equation:
[0048] M i ( q i ) q ·· i + C i ( q i , q · i ) q · i + g i ...
specific Embodiment approach 2
[0068] Step 4 of this embodiment specifically includes the following steps:
[0069] According to formula (1) and formula (2), we can get
[0070] M i ( q i ) z · 2 i + C i ( q i , q · i ) z 2 i + g i ( q i ) = τ i - M i ( q i ) ...
specific Embodiment approach 3
[0078] Step 2 of this embodiment specifically includes the following steps:
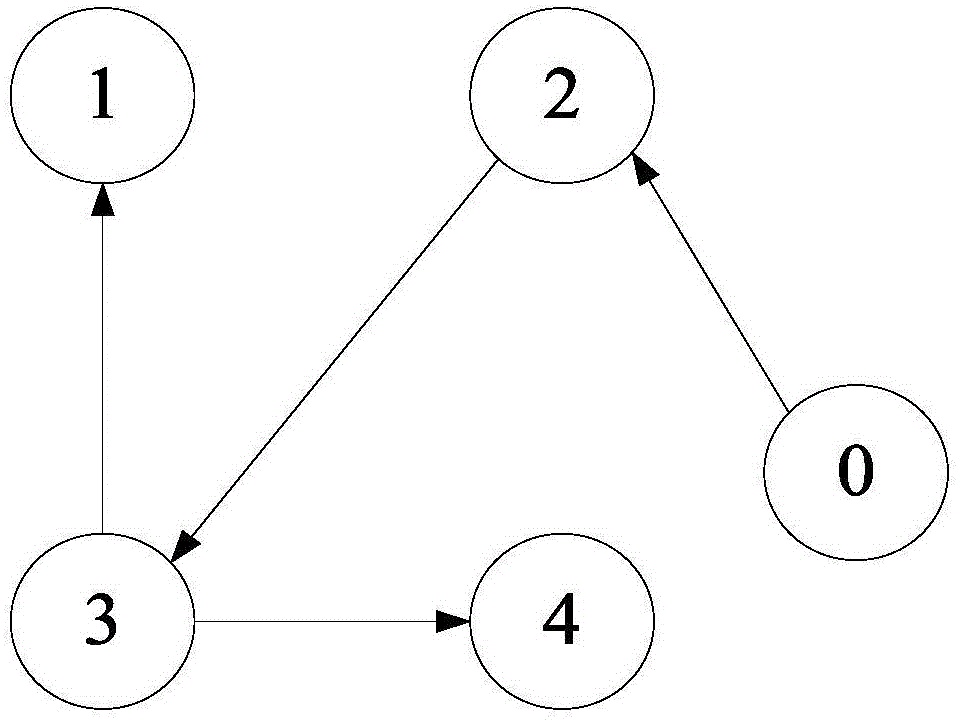
[0079] The communication topology between robots is represented by a directed graph G=(v,ε), v={0,1,2,…,n} is the set of all nodes, is the set of all edges; with nodes Indicates robot i * ,node Indicates that the robot j * , and i * ≠ j * ; In the directed graph G=(v,ε), each edge has two nodes side Indicates that the robot j * able to receive robot i * information; a directed path is defined as an edge set an ordered sequence of If at least one node has a directed path from the node to other nodes, the directed graph is said to have a directed spanning tree;
[0080] matrix A = ( a i * j * ) ∈ R n × ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More