

Satellite formation relative orbit adaptive neural network configuration containment control method
A relative orbit and neural network technology, which is applied in the field of satellite formation relative orbit adaptive neural network configuration inclusion control, can solve the problem of buffeting phenomenon, system nonlinear uncertainty and external interference, and satellite formation Problems such as system dynamics generalized interference, to avoid communication burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
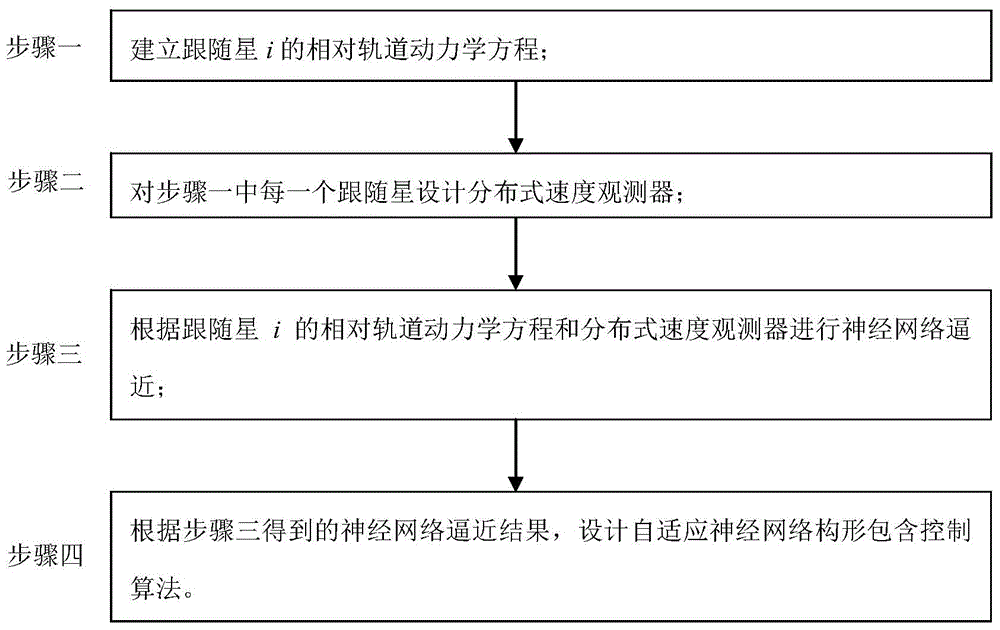
[0096] Specific implementation mode one: combine figure 1 Illustrate this embodiment, a kind of satellite formation relative orbit self-adaptive neural network configuration includes control method, it is characterized in that, a kind of satellite formation relative orbit self-adaptive neural network configuration includes control method is specifically carried out according to the following steps:
[0097] Step 1, establishing the relative orbital dynamics equation following star i;
[0098] Step 2. Design a distributed velocity observer for each following star in step 1;
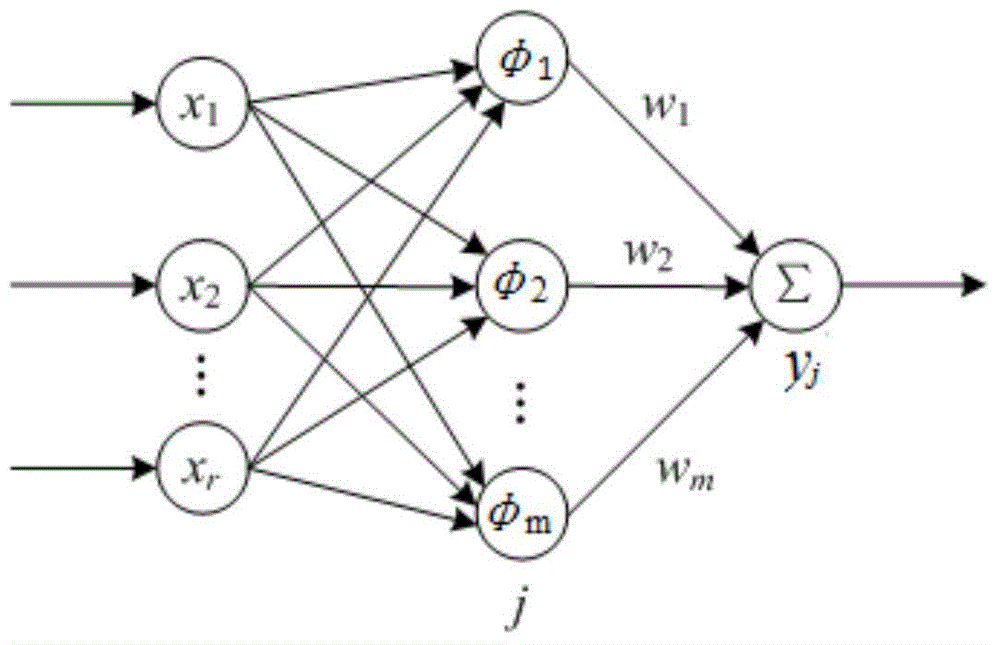
[0099] Step 3, performing neural network approximation according to the relative orbital dynamics equation and the distributed velocity observer following star i;
[0100] Step 4. According to the neural network approximation result obtained in step 3, design an adaptive neural network configuration including a control algorithm.
specific Embodiment approach 2
[0101] Specific embodiment two: the difference between this embodiment and specific embodiment one is that the relative orbital dynamics equation of following star i is established in said step one; the specific process is:
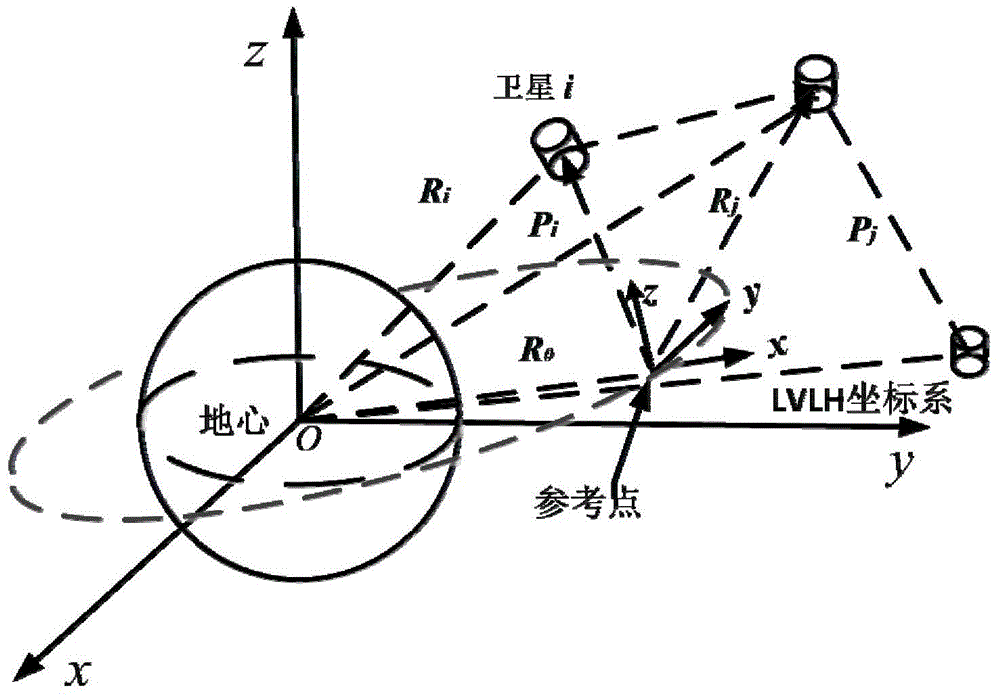
[0102] Such as image 3 Shown is the satellite formation system and the reference orbit coordinate system of the satellite formation system, that is, the LVLH coordinate system,
[0103] The x-axis of the LVLH coordinate system points from the center of the earth to the reference point, the y-axis of the LVLH coordinate system runs along the speed direction of the reference point, and the z-axis of the LVLH coordinate system is determined by the x-axis and y-axis according to the right-hand rule;
[0104] Considering that the reference point runs on a near-circular orbit, the orbital angular velocity of the reference point is In the LVLH coordinate system, the relative orbit dynamics equation of following star i relative to the reference point is:
[0...
specific Embodiment approach 3
[0114] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that in the step two, a distributed speed observer is designed for each following star in the step one; the specific process is:
[0115] The present invention considers that all pilot stars have a constant velocity. Since the speed of the pilot star is not globally known, in order to realize the containment control of all follower stars on the pilot star,
[0116] Design a distributed velocity observer for each follower star, as shown in the following formula:
[0117] v ^ · i = - β [ Σ j = 1 N a i j ( v ^ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More