

Multi-robot system fault diagnosis method
A multi-robot and system failure technology, applied in the direction of instruments, computer components, character and pattern recognition, etc., can solve the problems of lack of hierarchical knowledge expression, inefficient search strategy, and lack of learning ability, etc., and achieve high frequency Resolution, robust effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
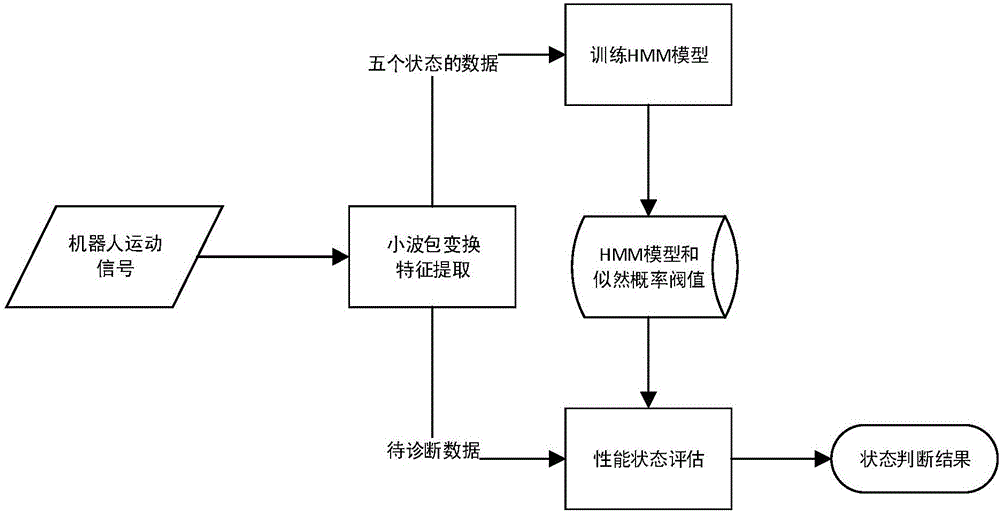
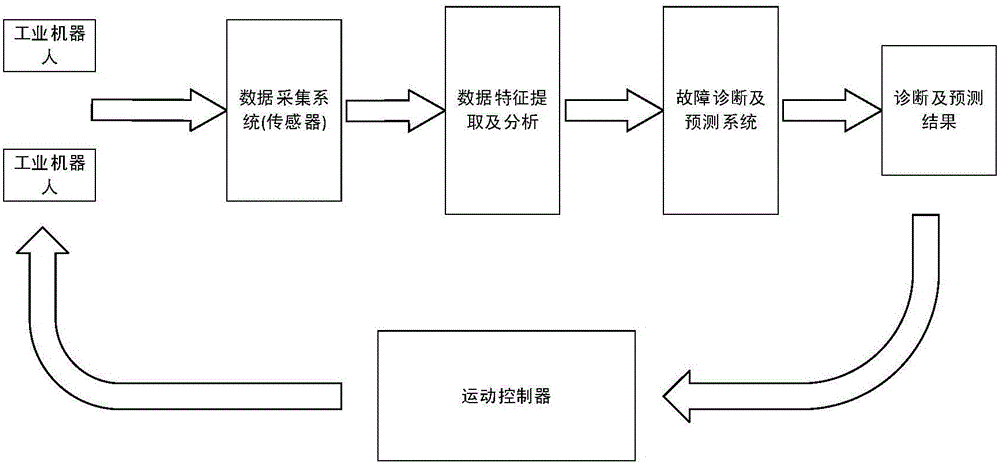
[0055] Such as figure 1 , image 3 As shown, this embodiment provides a method for fault diagnosis of a multi-robot system, using a hidden Markov model (HMM) for fault diagnosis and fault prediction. Among them, fault diagnosis is a prerequisite for fault prediction. This method first performs fault diagnosis on each working cycle of the robot, and then predicts the future working state of the robot according to the previous judgment results, so as to control the motion controller of the robot. The method specifically includes the following steps:
[0056] 1) Obtain real-time robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More