Camera self-calibration method based on IOS-PSO (Internetwork Operating System-Particle Swarm Optimization)
A camera and coordinate system technology, applied in the field of computer vision, can solve problems such as large errors and large changes in operating results, and achieve the effects of improving accuracy, avoiding volatility, and being easy to implement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
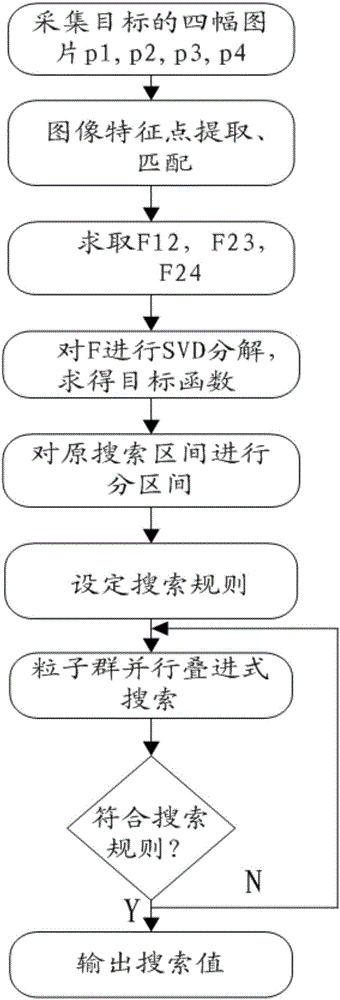
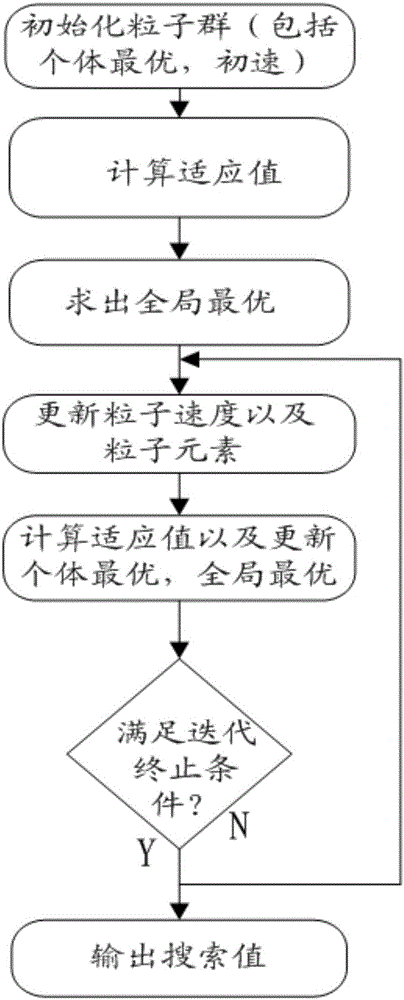
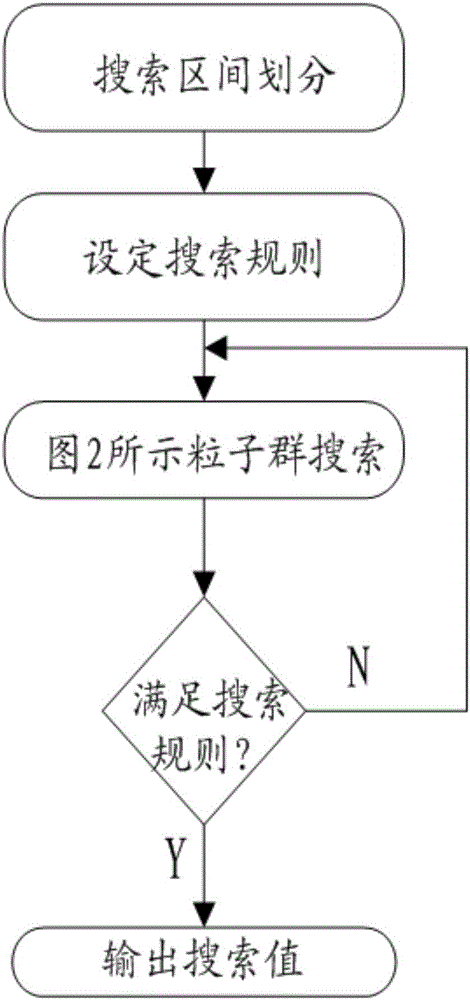
[0102] An IOS-PSO-based method for camera self-calibration derived from an optimization search of an independent five-parameter cost function. It mainly includes three steps: S1. Establishing a cost function based on internal parameters of the camera; S2. IOS-PSO optimizing the cost function; S3. IOS-PSO search result limiting rules. The specific introduction of this method is as follows:
[0103] S1. Establishing a cost function of the camera based on internal parameters;
[0104] Such as Figure 8 As shown, any point x in the left figure has a corresponding epipolar line I' in the right figure, and the mapping relationship between the two is expressed as x→I', introducing the fundamental matrix F, and expressing this mapping as:
[0105] I'=Fx(0.7)
[0106] Because the corresponding point x in the left picture is located on the epipolar line I' in the right picture, the corresponding image points of the two images of the same scene satisfy:
[0107] x'Fx=0(0.8)
[0108]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com