

Double-freedom degree rotation device driven by ultrasonic motor
An ultrasonic motor and rotating device technology, applied in electromechanical devices, generators/motors, electric components, etc., can solve the problems of low driving accuracy, complex structure, large volume, etc., and achieve small size, compact overall structure, and high precision. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
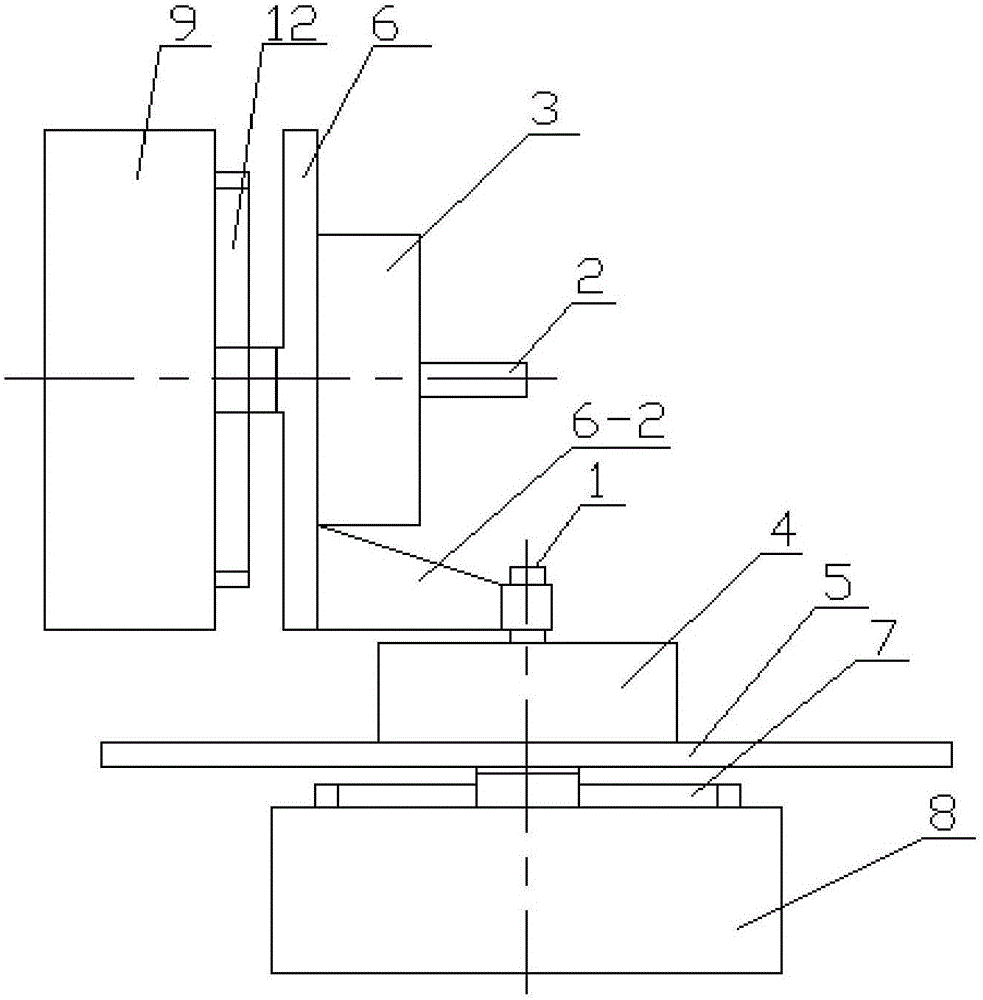
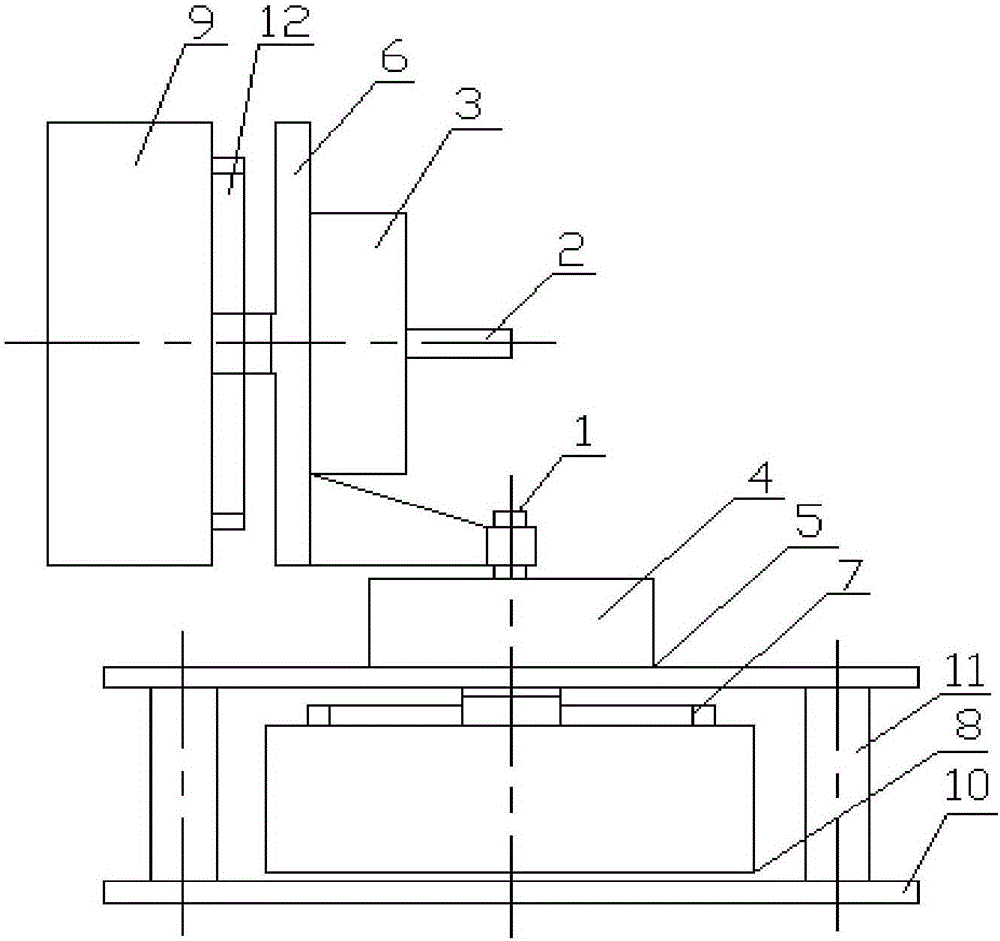
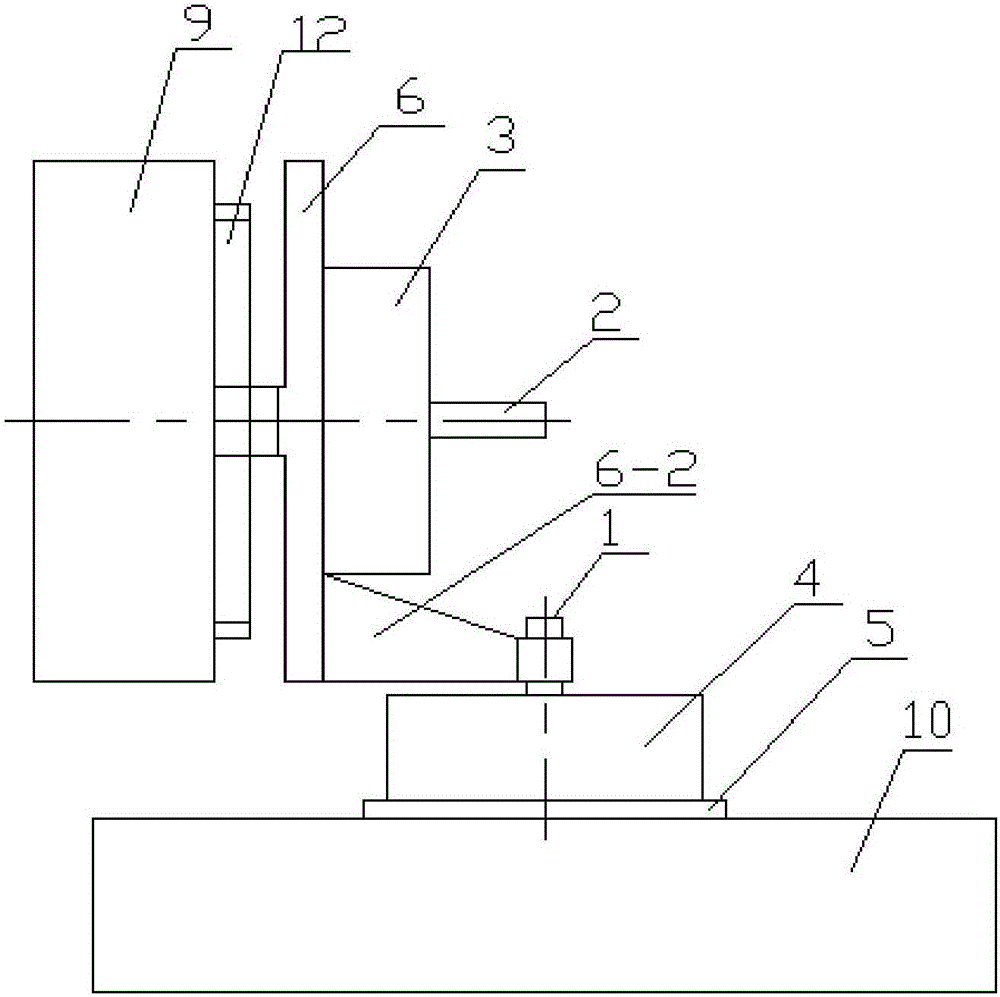
[0014] Specific implementation mode one: combine Figure 1-Figure 5 Explain that a two-degree-of-freedom rotating device driven by an ultrasonic motor in this embodiment includes a supine motion mechanism and an azimuth motion mechanism;
[0015] The azimuth movement mechanism includes an azimuth ultrasonic motor 4, an azimuth ultrasonic motor seat 5 and an azimuth encoder 8;
[0016] The supine motion mechanism includes a pitching ultrasonic motor 3, a pitching ultrasonic motor seat 6 and a pitching encoder 9;
[0017] The azimuth ultrasonic motor 4 is installed on the azimuth ultrasonic motor base 5, the shaft of the azimuth encoder 8 is coaxially connected to the motor shaft of the azimuth ultrasonic motor 4, and the output shaft of the azimuth ultrasonic motor 4 is connected to the pitch ultrasonic motor base 6;
[0018] The pitching ultrasonic motor 3 is installed on the pitching ultrasonic motor base 6, the shaft of the pitching encoder 9 is coaxially connected with the...
specific Embodiment approach 2
[0020] Specific implementation mode two: combination Figure 1-Figure 5 Note that the azimuth ultrasonic motor 4 in this embodiment is a traveling wave rotary ultrasonic motor or a standing wave rotary ultrasonic motor. Such a setting is small in size, light in weight, convenient and reliable in use, and meets actual needs. The load can rotate 360° around the output shaft of the azimuth ultrasonic motor 4, and the load can rotate ≥ 180° around the output shaft of the pitch ultrasonic motor 3. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0021] Specific implementation mode three: combination Figure 1-Figure 5 Note that the pitching ultrasonic motor 3 of this embodiment is a traveling wave rotary ultrasonic motor or a standing wave rotary ultrasonic motor. Such a setting is small in size, light in weight, convenient and reliable in use, and meets actual needs. The load can rotate 360° around the output shaft of the azimuth ultrasonic motor 4, and the load can rotate ≥ 180° around the output shaft of the pitch ultrasonic motor 3. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More