

Wearable power-assisted exoskeleton lower limb mechanism
An exoskeleton and wearable technology, applied in the field of robotics, can solve immature problems and achieve the effect of light weight, small size and flexible layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
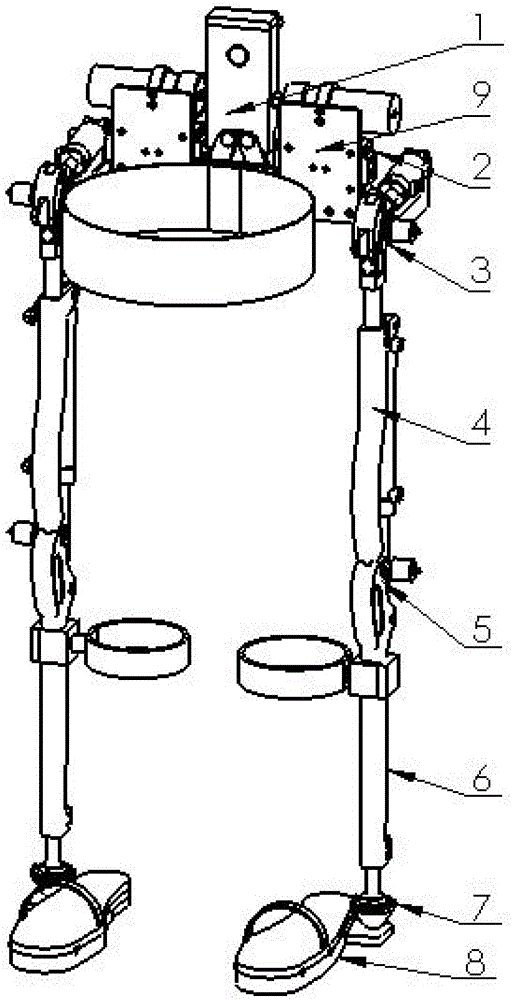
[0026] Such as figure 1 As shown, the present invention includes: a waist 1, a left leg, a right leg, a hydraulic servo drive system 2, a real-time controller, and a power supply module; wherein, the left leg and the right leg are respectively hinged to the waist 1 and arranged symmetrically on the waist 1 Both sides; the hydraulic servo drive system 2 is connected with the left leg and the right leg respectively, and controls them; the hydraulic servo drive system 2 is connected with the real-time controller; the power supply module supplies power to the hydraulic servo drive system 2; the power supply module can be powered by Carry lithium battery to realize;
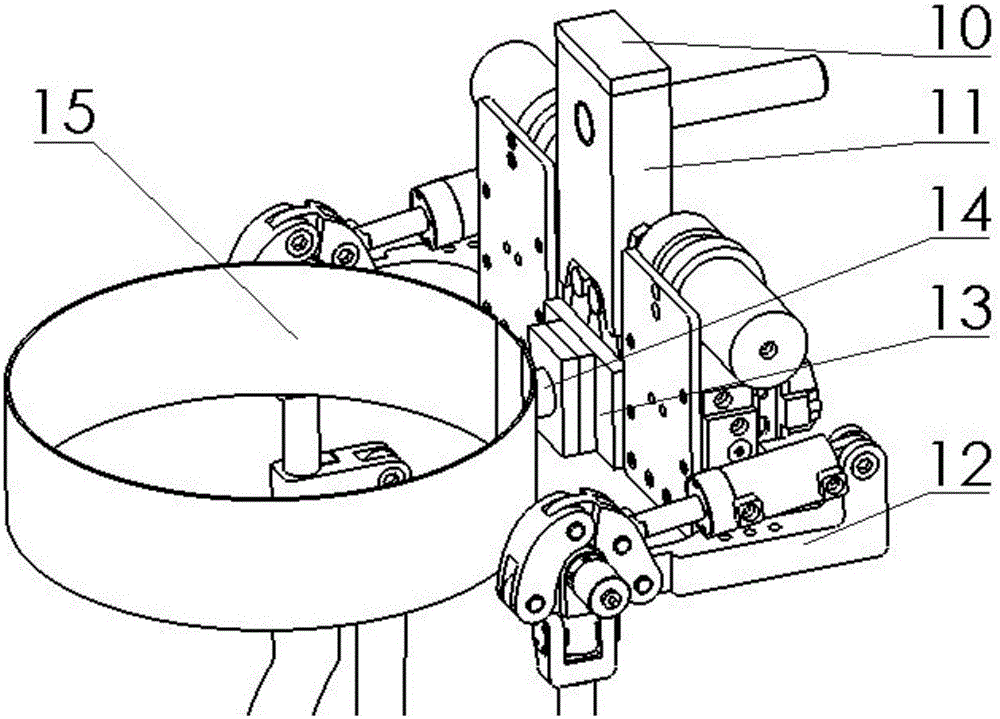
[0027] The waist 1 includes: an inclination sensor 10, a load plate 11, two base plates 12, a second connecting plate 13, a first multidimensional force sensor 14, and a waist strap 15; wherei...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More