

Laser cleaning system based on robot control and cleaning method thereof
A control system and laser cleaning technology, applied in the field of laser cleaning, can solve the problems of difficult operation, limited scanning angle of galvanometer, poor adaptability, etc., and achieve the effect of wide application range, strong adaptability and strong automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
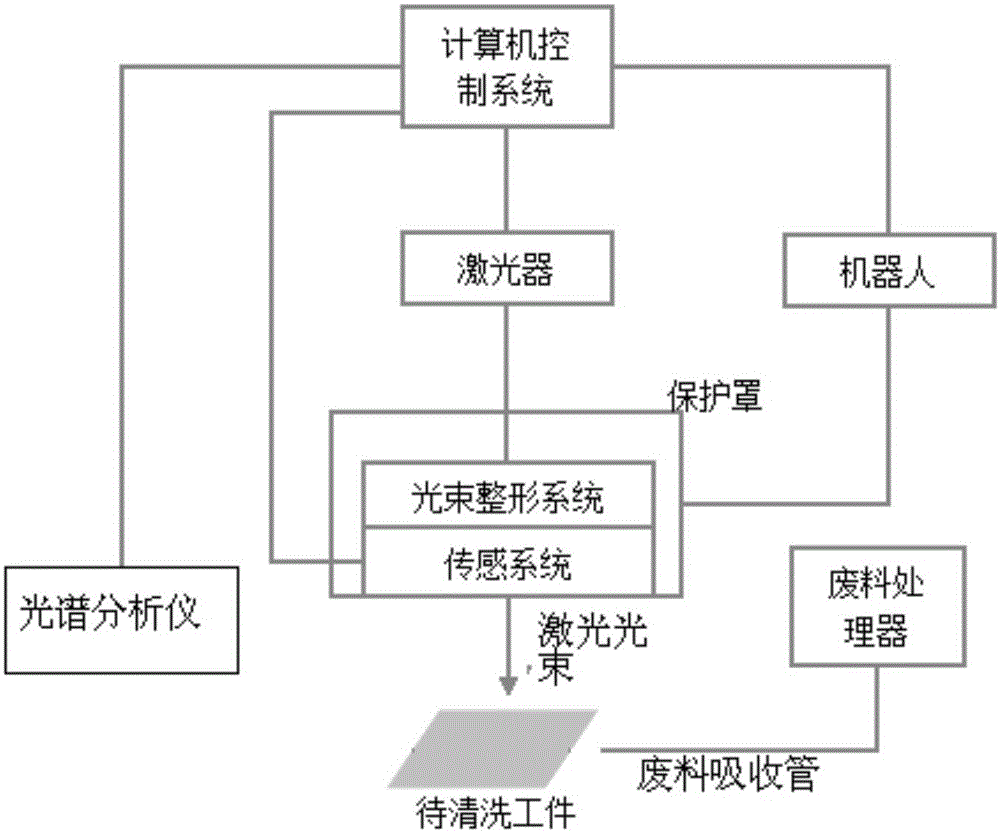
[0032] The method for performing laser cleaning using the above-mentioned laser cleaning system based on robot control comprises the following steps:
[0033] (1) According to figure 1 The structural block diagram of the laser cleaning system based on robot control Connect all components and instruments, turn on the power of the laser to preheat the laser, and then turn on the power of the robot, sensor system, spectrum analyzer and waste processor, so that they are all in the standby state , set the working parameters of the laser: its wavelength is 1064nm, the pulse repetition rate is 30kHz, and the output power is 10W; set the working parameters of the robot so that the distance between the laser exit port in the protective cover and the cleaning surface of the workpiece to be cleaned is 10cm, Set the scanning speed to 5mm / s, and the swing range to 0.5m;
[0034] (2) Adjust the robot arm to the position where the workpiece to be cleaned needs to be cleaned, and adjust the ...
Embodiment 2
[0042] According to the cleaning method and operation process of embodiment 1, to Figure 6 (a) The paint layer on the irregular workpiece shown in (a) is cleaned. The effect after cleaning is as follows Figure 6 (b) shown.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More