

Unmanned vehicle speed control method based on PSO and RBF neutral network
An unmanned vehicle and vehicle speed control technology, which is applied in vehicle testing, machine/structural component testing, special data processing applications, etc. Mileage evaluation indicators and other issues
Inactive Publication Date: 2015-12-09
JIANGSU UNIV
View PDF12 Cites 27 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Traditionally, two methods are used to test the mileage and energy consumption of electric vehicles. The first is manual driving, which makes the test results largely affected by human factors, thus affecting the mileage evaluation index.
The second is to test on a dynamometer. Since the dynamometer is controlled according to a certain torque, constant speed, and constant current, and the driving motor of the car is in variable torque and variable speed when driving normally, this kind of test is difficult. Simulate the real driving conditions of electric vehicles
But the training time of RBF is shorter
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0111] In order to verify the theoretical effect of the present invention, this paper carries out the emulation test to European ECE urban working conditions and Chinese typical urban working conditions (GB / T19754-2005) respectively, and its result is as follows Figure 7 , Figure 8 , it can be seen from the results that the control method proposed by the present invention has strong adaptability and good control accuracy.
Embodiment 2
[0113] Further, in order to verify the implementation effect of the present invention, test is carried out in indoor test bench, and its result is as follows Figure 9 It can be seen from the results that the control method of the present invention also has good control accuracy in the measured environment.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
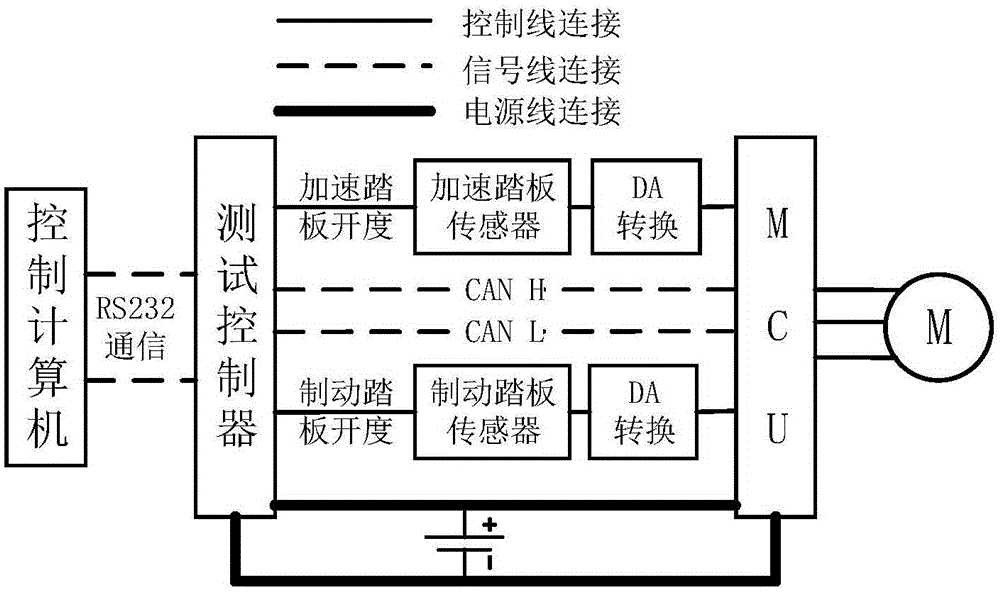
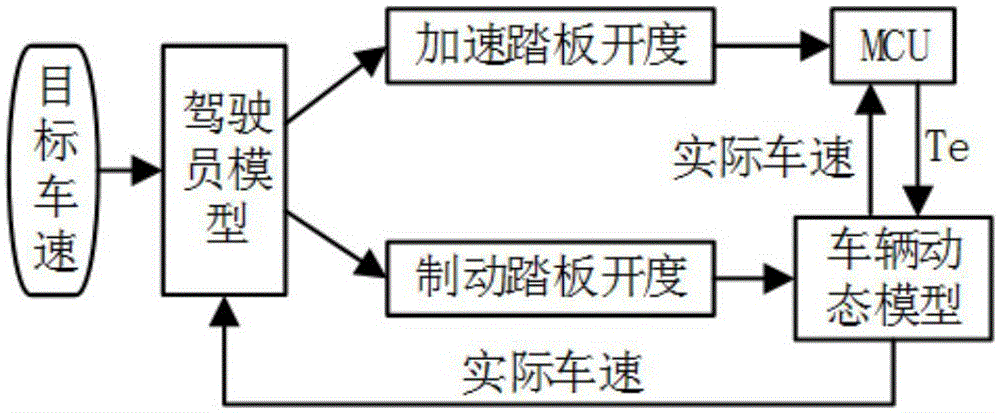
The invention discloses an unmanned vehicle speed control method based on PSO (Particle Swarm Optimization) and an RBF neutral network. The method comprises the following specific steps: 1, establishing an unmanned vehicle speed control system configuration; 2, building a vehicle speed tracking closed loop control mathematic dynamic model; 3, building an unmanned vehicle speed control driver model based on a fuzzy RBF neutral network structure; 4, fuzzifying an input variable of the driver model to obtain a fuzzy value, and utilizing the fuzzy value to establish an input and output variable membership function; 5, establishing a driver model fuzzy control rule list on the basis of the step 3, the step 4, the experience of a driver and measurement data; 6, calculating the fitness of each rule in the driver model, and completing fuzzification and normalization calculation; 7, establishing an improved PSO control flow on the basis of PSO; and 8, establishing a vehicle speed control flow on the basis of the improved PSO and a fuzzy RBF neutral network algorithm. According to the vehicle speed control method, the vehicle speed tracking error is low, and the anti-interference capability is high.
Description
technical field [0001] The invention belongs to the technical field of automatic driving device control for automobile tests, and in particular relates to a fuzzy neural network control for unmanned driving of electric vehicles capable of realizing accurate tracking of a given target vehicle speed. Background technique [0002] The mileage and energy consumption of electric vehicles are one of the important indicators to directly evaluate the performance of electric vehicles. Traditionally, two methods are used to test the mileage and energy consumption of electric vehicles. The first is manual driving, which makes the test results largely affected by human factors, thus affecting the mileage evaluation index. The second is to test on a dynamometer. Since the dynamometer is controlled according to a certain torque, constant speed, and constant current, and the driving motor of the car is in variable torque and variable speed when driving normally, this kind of test is diffic...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01M17/007G06F17/50
Inventor 盘朝奉陈燎袁朝春陈龙江浩斌李仲兴蔡英凤谢明维
Owner JIANGSU UNIV