Robot obstacle detection system and method
An obstacle detection and robot technology, applied in the field of intelligent robots, can solve problems such as dead angles, complex structural design, and high cost of developing molds, and achieve the effects of reduced mold costs, simplified structural design, and long service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
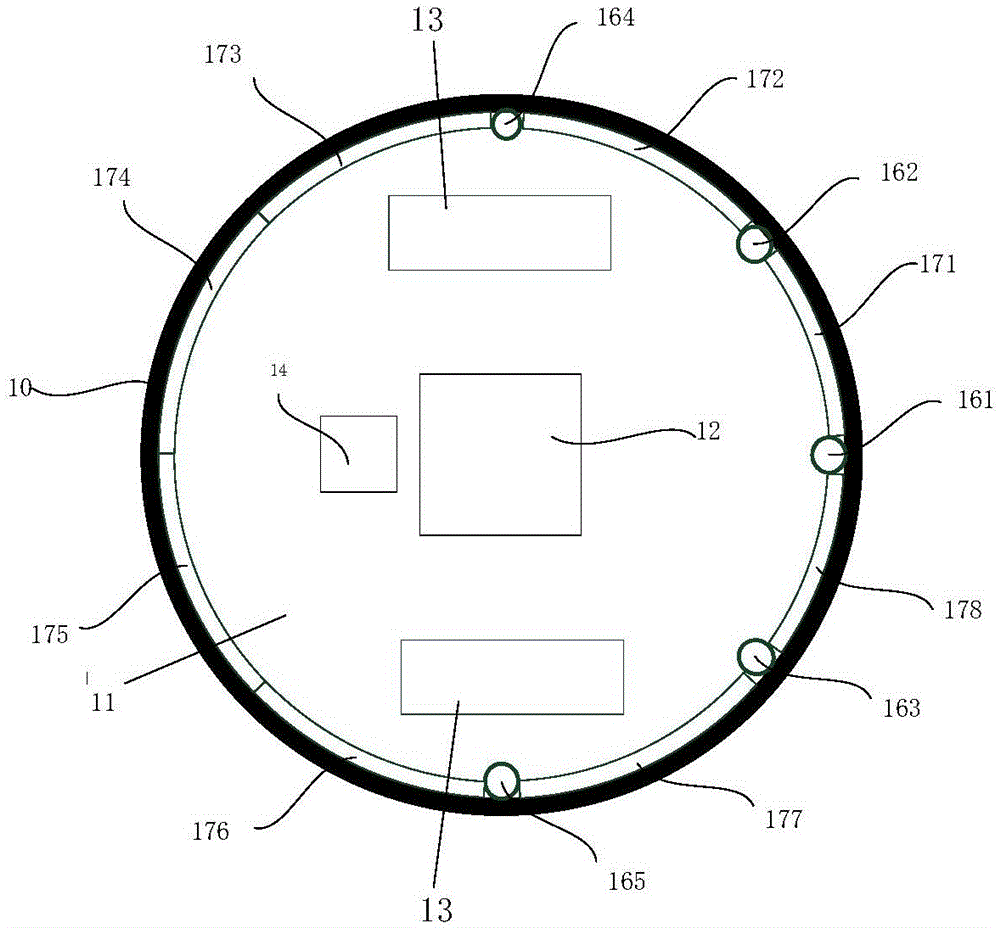
[0019] Such as figure 1 As shown, the robot obstacle detection system provided by this embodiment includes a housing 10, a base 11 control board 12, two action wheels 13, a universal wheel, two driving motors (not shown in the figure), a motor current detection module 14. Five obstacle detection sensors (respectively numbered 161-165 in the figure) and eight collision detection mechanisms (respectively numbered 171-178 in the figure).
[0020] The housing 10 is in the shape of a disc box, and the base 11 is fixedly connected to the bottom of the housing 10 . The control board 12 and the motor current detection module 14 are disposed in the casing 10 . Two action wheels 13 are arranged side by side on the base 11 , two driving motors respectively drive one action wheel, and the control ends of the two driving motors are connected to the action control signal output end of the control board 12 . The detection end of the motor current detection module 14 detects the currents of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com