

Reinforcement learning algorithm applied to non-tracking intelligent trolley barrier-avoiding system
A technology of reinforcement learning and smart cars, applied in the field of robotics research, to reduce the risk and labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the present invention more comprehensible, preferred embodiments are described in detail below with accompanying drawings.
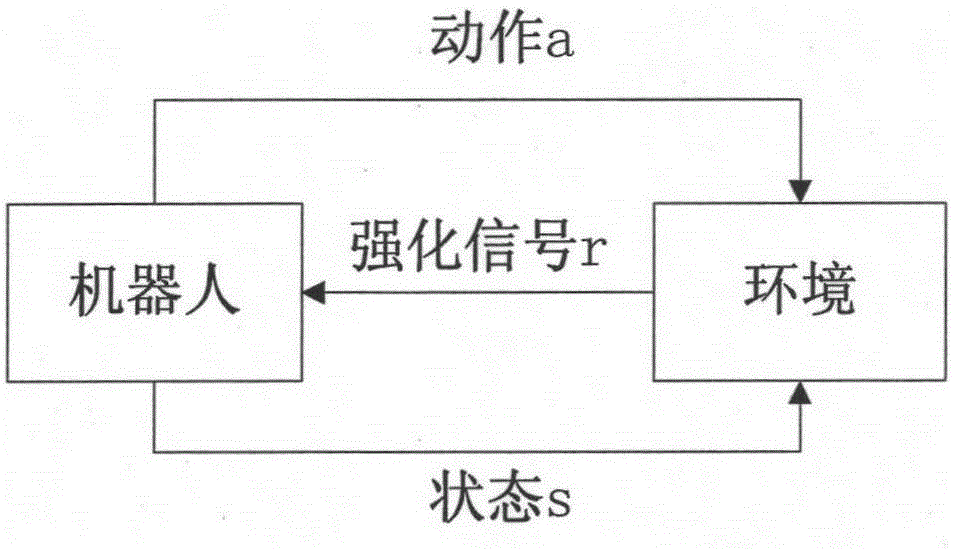
[0025] The obstacle avoidance of mobile robots is a fully intelligent obstacle avoidance system without human interference, and will make outstanding contributions to replace humans in working in extreme environments in the future. It and robotics, communication technology, computer vision, multi-sensor information fusion, intelligent control, multi-agent (Multi-Agent), mechanics, etc., embody the latest achievements in information science and artificial intelligence technology, and are in the field of robotics research. an important part of it.
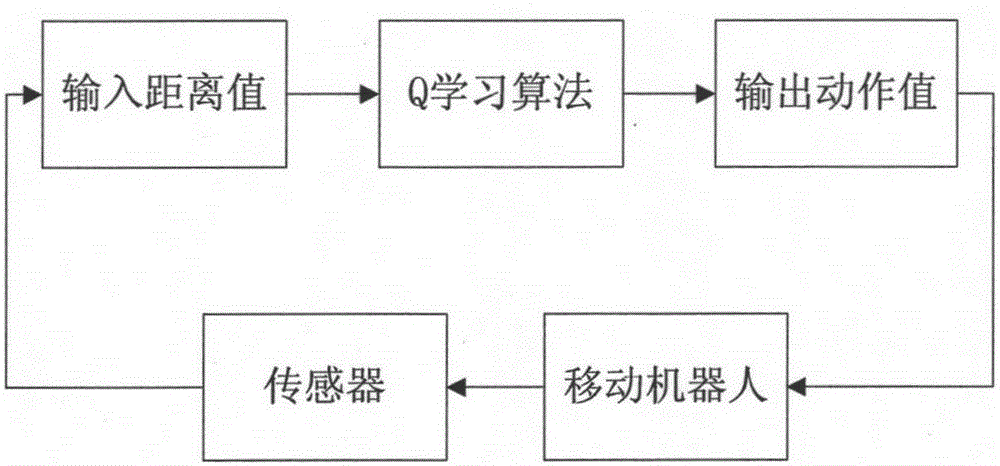
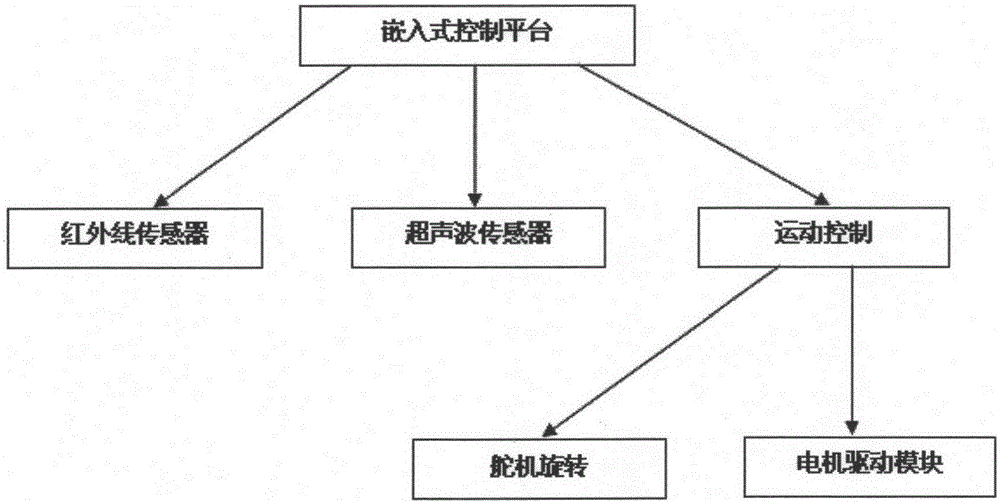
[0026] Combining the current research status of the intelligent car obstacle avoidance system at home and abroad, the present invention analyzes and develops the entire obstacle avoidance system, uses infrared sensors and ultrasonic detectors to detect the surrounding environment, and us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More