

Double-pendulum crane global time optimal trajectory planning method based on pseudo-spectral method
A time-optimized and trajectory-planning technology, applied in the directions of load-hanging components, transportation and packaging, etc., can solve problems such as the inability to achieve global time-optimized control effects and the inability to ensure the maximum operating efficiency of the crane system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
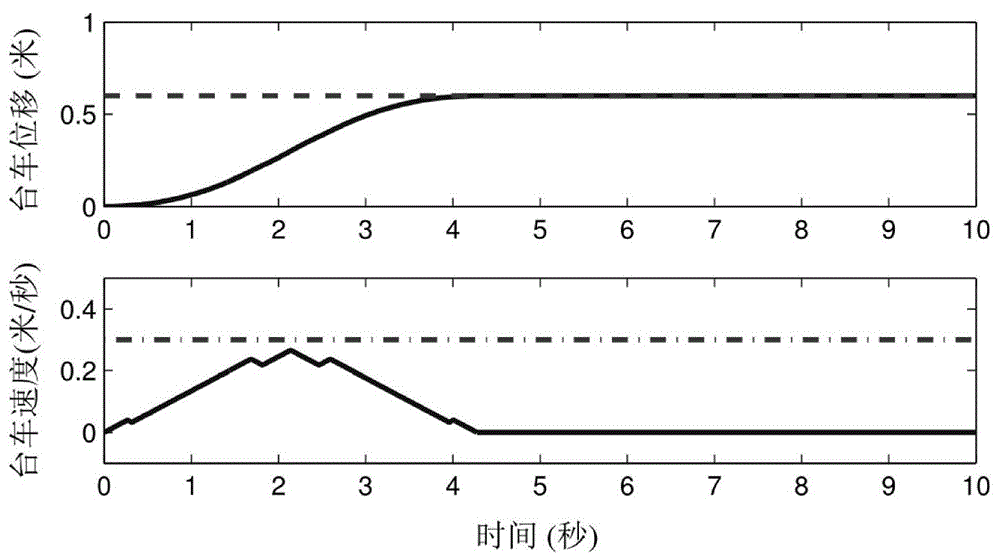
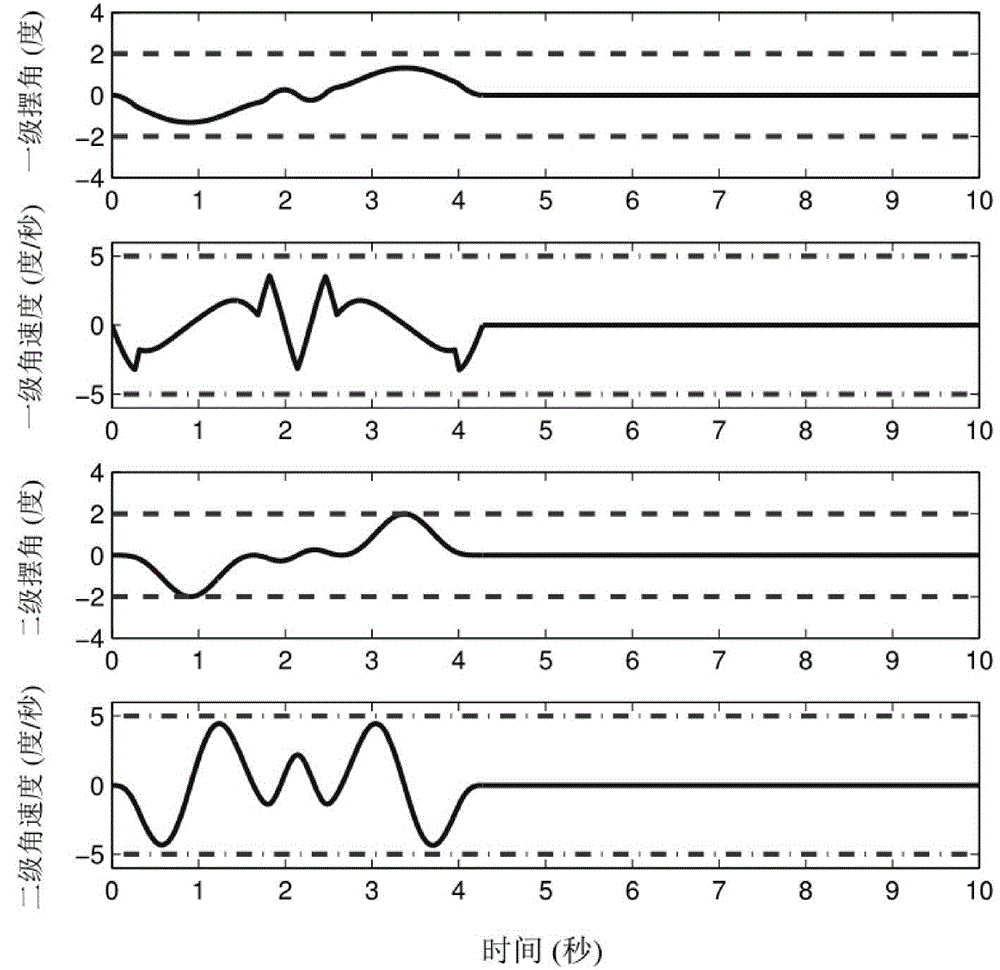
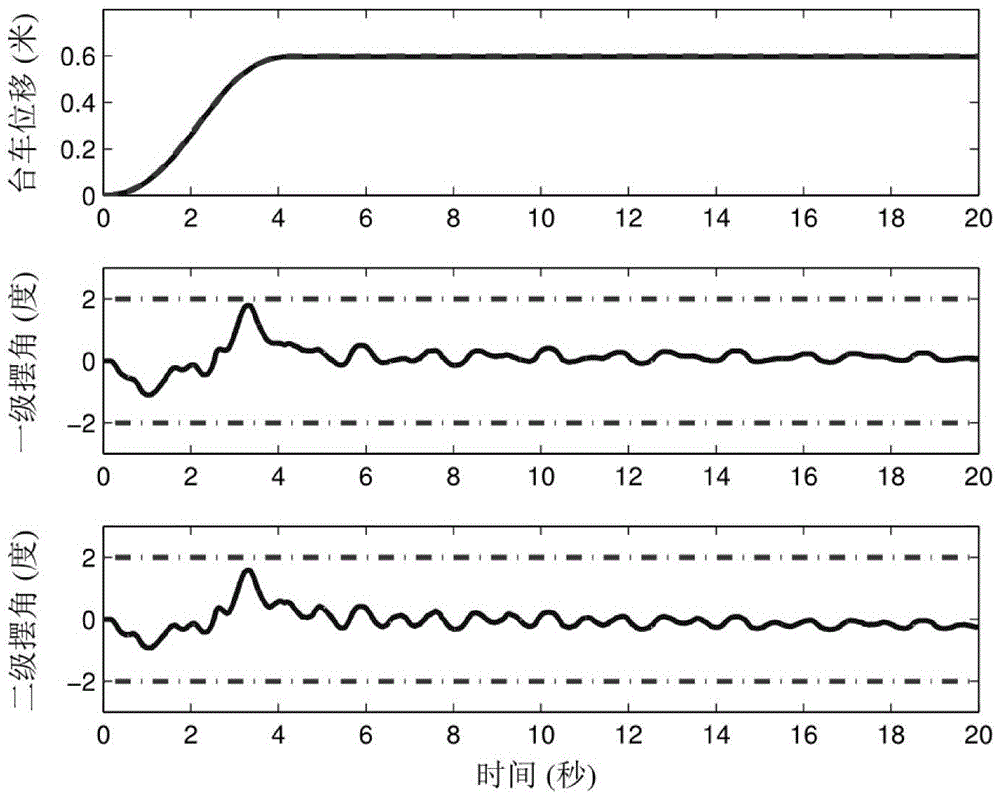
[0121] Analyzing the control objective of the crane system, considering various constraints including the two-stage swing angle and the upper limit of the speed and acceleration of the trolley, the following optimization problem with the transportation time as the cost function is obtained:
[0122] min T s . t . x ( 0 ) = x · ( 0 ) = x ·· ( 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More